
Схема ДТП: пошаговая инструкция составления в 2020 году
Если произошла авария, происшествие необходимо оформить в соответствии с нормами действующего законодательства. В 2020 году в обязательном порядке составляется схема ДТП. Схематическое отображение дорожно-транспортного происшествия позволяет представителям уполномоченных органов наглядно изучить случившееся и разобраться во всех деталях происшествия. Схема ДТП в последствии учитывается во время принятия решения о признании одного из водителей виновником происшествия, поэтому особенно важно её грамотное составление.
Зачем составлять схему ДТП?
В 2020 году на основании схематического плана аварии происходит определение виновника дорожно-транспортного происшествия. Сотрудники ГИБДД и работники страховой компании получают возможность подробно разобрать обстоятельства случившегося. Если происходит обращение в суд, схема ДТП в обязательном порядке прикрепляется к материалам дела.
Внимание! Если у вас возникнут вопросы, можете бесплатно проконсультироваться в чате с юристом внизу экрана или позвонить по телефонам: +7 (495) 771-69-94 Москва; +7 (812) 449-44-43 Санкт-Петербург; +7 (800) 700-53-58 Бесплатный звонок для всей России.
Внимание
Схема ДТП составляется после любой аварии. При составлении европротокола, действие может выполнить любой участник происшествия. Если ДТП требует вызова сотрудников Госавтоинспекции, они составят схему аварии самостоятельно. Чтобы документ был признан действительным, он должен быть оформлен в соответствии с положениями ФЗ №40 от 25 апреля 2002 года об ОСАГО.
Можно ли составить схему ДТП самому?
Схема ДТП оформляется участниками происшествия, если оформление аварии выполняется по европротоколу. Она составляется на бланке извещения. Для начертания плана предназначена графа 17. В дальнейшем документ предоставляется в страховую компанию. Участники аварии готовят извещения в 2 экземплярах. Расположение объектов на обеих схемах должно быть идентичным.
Если использование европротокола в рамках сложившейся ситуации недопустимо, происходит вызов ГИБДД. Представители уполномоченного органа самостоятельно подготовят схему. Они действуют в рамках административного регламента исполнения МВД РФ гос. функции по надзору за соблюдением требования законодательства в области безопасности дорожного движения.
функции по надзору за соблюдением требования законодательства в области безопасности дорожного движения.
Готовая схема ДТП предоставляется участникам происшествия для ознакомления. Если водители согласны с нюансами случившегося, они проставляют подписи. Допустим отказ от выполнения процедуры. В этом случае удостоверение схемы выполняется понятыми. Если их нет, проводится видеосъемка (пункт 282 приказа МВД №664).
Когда нельзя самостоятельно составлять схему ДТП?
Самостоятельное составление схемы ДТП возможно, если используется европротокол. Условия его применения регламентирует статья 11.1 ФЗ №40 об ОСАГО от 25 апреля 2002 года. В соответствии с вышеуказанным нормативно-правовым актом, применение европротокола допустимо:
- в аварии приняло участие два автомобиля;
- у обоих водителей имеются действующие полисы ОСАГО;
- в происшествии не пострадали люди;
- ущерб ТС потерпевшего составляет не более 100 тыс.руб (при отсутствии разногласий и использовании приложения ДТП.
 Европротокл 400 тыс.руб).
Европротокл 400 тыс.руб).
 Европротокл 400 тыс.руб).
Европротокл 400 тыс.руб).Если хотя бы одно из условий не выполняется, самостоятельное составление схематического плана происшествия недопустимо. Оформление производится с привлечением сотрудников ГИБДД. Если участники происшествия пренебрегают установленными нормами, страховая компания имеет право отказать в возмещении.
Закон о составлении схематического плана аварии
Необходимость составления схемы ДТП в 2020 году упоминается в пункте 273 Административного регламента исполнения МВД РФ функции по осуществлению надзора за соблюдением требований законодательства в области безопасности дорожного движения. Нормативно-правовой акт регламентирует перечень действий, которые обязаны предпринять сотрудники Госавтоинспекции для фиксации происшествия. Оформление схемы ДТП выполняется в соответствии с пунктами 280-282 Приказа МВД №664.
Возможность составления документа участниками аварии в действующем законодательстве не фиксируется. Однако потребность в оформлении схемы ДТП в 2020 году возникает при заполнении бланка европротокола. Возможности его применения регламентирует статья 11.1 ФЗ №40 от 25 апреля 2002 года об ОСАГО. Это делает возможным самостоятельное составление схемы ДТП, но только в случае, если присутствуют условия, позволяющие применить европротокол в 2020 году.
Возможности его применения регламентирует статья 11.1 ФЗ №40 от 25 апреля 2002 года об ОСАГО. Это делает возможным самостоятельное составление схемы ДТП, но только в случае, если присутствуют условия, позволяющие применить европротокол в 2020 году.
Требования к составлению схемы ДТП в 2020 году
Составляя схематический план дорожной аварии, необходимо руководствоваться общими требованиями, предъявляемыми к заполнению европротокола. Данные вносятся шариковой ручкой. Чернила должны быть синего или чёрного цвета. Сведения фиксируются печатными буквами. В заполнении бланка участвуют оба водителя. Каждый из них заполняет свою часть в документах.
Если допущены ошибки, исправлять весь план не нужно. Достаточно зачеркнуть неверные данные, указать правильную информацию и рядом с ней поставить подпись Исправления верны. Схема ДТП в обязательном порядке должна быть подписана. Процедура выполняется, когда все сведения внесены. Подписи проставляют оба участника происшествия. Когда действие осуществлено, внесение исправлений становится недопустимо. Перед тем, как подписать бланк извещения, необходимо внимательно проверить информацию.
Когда действие осуществлено, внесение исправлений становится недопустимо. Перед тем, как подписать бланк извещения, необходимо внимательно проверить информацию.
Что должно быть в схеме ДТП?
Жестких требований, касающихся оформления схемы ДТП физическими лицами, нет. Основной нормой выступает предоставление достоверной информации в полном объёме. На основании документа будет определяться ответственность сторон. Поэтому, в соответствии с пунктам 280-282 Приказа МВД №664, в схеме ДТП в 2020 году важно отразить следующие сведения:
- Присутствующие преграды, если они имели место быть на пути движения.
- Место происшествия. Описывается максимально подробно. Необходимо указать названия улиц, местоположение приметных объектов и прочего.
- Расположение линий разметки, светофоров и дорожных знаков. Произведение требуется для того, чтобы представителю уполномоченного органа было понятно, присутствовали ли ограничения выполнения маневров.
- Ширина дороги и количество полос.
- Расположение машин перед аварией. Важно указать направление движения.
- Место первого соприкосновения транспортных средств.

Необходимые документы для составления схемы ДТП
В законодательстве отсутствует список документов, которые нужно иметь под рукой при составлении европротокола и схемы ДТП. В процессе внесения сведений в бланк могут понадобиться:
- СТС. На его основании в документы вносятся сведения об автомобиле.
- Водительское удостоверение. Его номер потребуется указать в бланке европротокола.
- Объяснение произошедшего дорожно-транспортного происшествия. Составить документ должны оба водителя. Бумага оформляется в свободной форме.
Пошаговая инструкция самостоятельного составления схемы ДТП в 2020 году
Если в происшествии отсутствует пострадавший, в столкновении приняли участие только 2 транспортных средства, ущерб автомобилю невиновного водителя составляет не более 100 тыс. руб (при отсутствии разногласий и использовании приложения «ДТП.Европротокл» 400 тыс.руб), аварию можно оформить самостоятельно. Составляя схему ДТП, нужно выполнить следующие манипуляции:
руб (при отсутствии разногласий и использовании приложения «ДТП.Европротокл» 400 тыс.руб), аварию можно оформить самостоятельно. Составляя схему ДТП, нужно выполнить следующие манипуляции:
- Определиться с масштабом чертежа. В первую очередь наносится участок дороги, на котором произошло столкновение. Важно схематично обозначить ландшафт, место присутствия дорожных знаков и светофоров. Все мельчайшие детали прорисовывать не стоит.
- Выполняется нанесение на бумагу схематичного изображения транспортных средств. Обычно они представляются в виде прямоугольника с фарами. Последние в свою очередь изображаются в виде треугольников. Место столкновения обозначается крестиком.
- Фиксируются точные координаты автомобилей. Чтобы выполнить процедуру, рекомендуется произвести замеры расстояния между автомобилями, от колёс до обочины и определить иные показатели.
- Если на чертеже присутствуют помарки, его могут признать недействительным. Поэтому рекомендуется изначально составить черновик, согласовать его между собой, а затем переносить информацию в бланк европротокола. Он предоставляется вместе с полисом.
 Поэтому рекомендуется изначально составить черновик, согласовать его между собой, а затем переносить информацию в бланк европротокола. Он предоставляется вместе с полисом.
Поэтому рекомендуется изначально составить черновик, согласовать его между собой, а затем переносить информацию в бланк европротокола. Он предоставляется вместе с полисом.Составляется схема ДТП в пункте 17 извещения об аварии. В пункте 13 необходимо указать место столкновения на автомобиле.
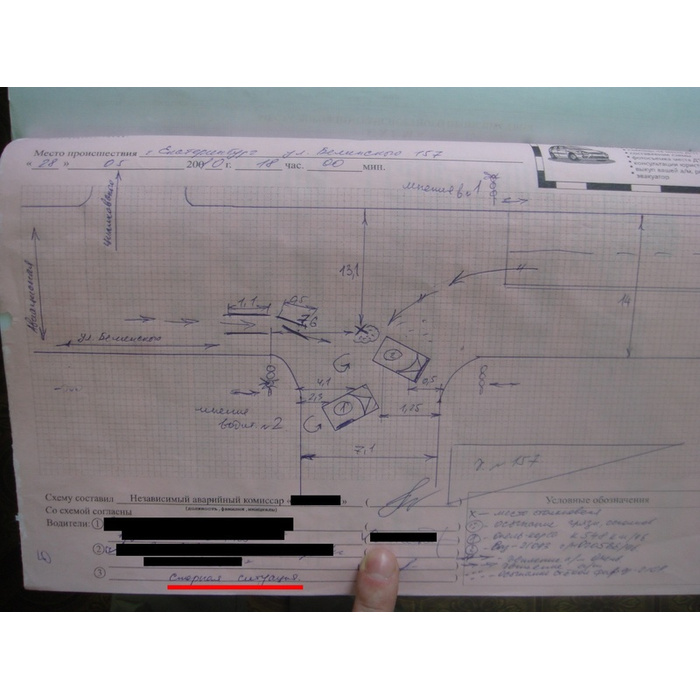
Пример самостоятельно составленной схемы ДТП
Стандартный бланк для составления схемы ДТП имеет следующий вид.
Скачать образец извещения о ДТП.
Представим, что транспортные средства двигались в одном направлении. В момент обгона произошло столкновение. Тогда схема ДТП будет выглядеть примерно так.
ВниманиеКрестиком обозначается место столкновения автомобилей. Стрелки указывают направление движения.
Как составить схему ДТП онлайн?
Впервые столкнувшись с необходимостью составить схему ДТП, водитель может испытать затруднение. Упростить процесс оформления в 2020 году позволяют онлайн-сервисы. Можно прибегнуть к помощи:
- Автокадабра. Это онлайн редактор схемы ДТП, отличающийся простотой использования. Он позволяет составить план даже сложного происшествия. В редакторе присутствует большое количество элементов. Их использование не ограничено. Воспользоваться системой можно здесь.
- Составление схемы ДТП онлайн. Сервис был разработан компанией, которая специализируется на выкупе транспортных средств. Система неприхотлива. Она может использоваться даже при наличии медленного интернета. Составить схему ДТП можно здесь.
- Конструктор дорожных ситуаций. Это мощная система, отличающаяся большим функционалом. Однако если человек использует ее впервые, можно столкнуться с длительным ожиданием. При повторном использовании скорость работы повысится. Воспользоваться конструктором можно здесь.
 Это онлайн редактор схемы ДТП, отличающийся простотой использования. Он позволяет составить план даже сложного происшествия. В редакторе присутствует большое количество элементов. Их использование не ограничено. Воспользоваться системой можно здесь.
Это онлайн редактор схемы ДТП, отличающийся простотой использования. Он позволяет составить план даже сложного происшествия. В редакторе присутствует большое количество элементов. Их использование не ограничено. Воспользоваться системой можно здесь.Как составить схему ДТП на парковке?
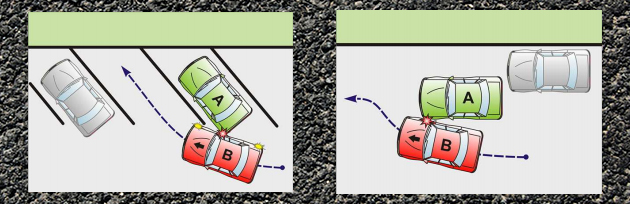
От стандартной схемы ДТП на парковке отличается необходимостью отображать на плане стоящие транспортные средства. Обычно они обозначаются пунктирной линией. Дополнительно предстоит зафиксировать посторонние объекты, попавшие в зону столкновения. Это могут быть столбы, мусорные баки. В качестве места столкновения указываются соответствующие части парковочной зоны. Рекомендуется отобразить на схеме проходящие рядом улицы. Это поможет детализировать адрес. В пояснении фиксируется, что ДТП произошло на стоянке. В остальном процесс оформления стандартный.
Дополнительно предстоит зафиксировать посторонние объекты, попавшие в зону столкновения. Это могут быть столбы, мусорные баки. В качестве места столкновения указываются соответствующие части парковочной зоны. Рекомендуется отобразить на схеме проходящие рядом улицы. Это поможет детализировать адрес. В пояснении фиксируется, что ДТП произошло на стоянке. В остальном процесс оформления стандартный.
Как составить схему ДТП на нерегулируемом перекрестке?
В первую очередь на бумагу наносится сама дорога и местоположение автомобилей на ней. Определение виновника аварии на нерегулируемом перекрестке выполняется с учетом знаков, установленных на пересечении. Составляя схему ДТП в 2020 году, важно обязательно отобразить их. В момент пересечения нерегулируемого перекрестка виновником происшествия признается водитель, который двигался по второстепенной дороге. Закон обязывает его пропустить все транспортные средства, которые едут по главной полосе.
Частые ошибки при составлении схемы дорожной аварии в 2020 году
Если составлением схемы ДТП занимается представитель Госавтоинспекции, обычно в оформлении плана проблем не возникает. Однако использование европротокола приводит к необходимости выполнить процедуру самостоятельно. В результате повышается риск появления ошибки. Чаще всего водители допускают следующие из них:
Однако использование европротокола приводит к необходимости выполнить процедуру самостоятельно. В результате повышается риск появления ошибки. Чаще всего водители допускают следующие из них:
- Место первого соприкосновения транспортных средств определено неправильно. Причиной ошибки нередко становится невнимательность.
- Водитель пытается скрыть выполнения тех или иных маневров. Действия выполняются исключительно из-за присутствия умысла. Осуществляя манипуляцию, автолюбитель надеется переложить вину на другого участника происшествия. Примером подобного выступает отказ признания в попытке совершения обгона перед столкновением или превышения скорости.
- Сигналы светофора описаны противоречиво. В этом случае для выяснения обстоятельств привлекаются очевидцы. На основании их показаний принимается решение о том, кто из водителей прав.
Последствия в случае неправильного составления схемы ДТП
Европротокол используется для получения страхового возмещения. Денежные средства предоставляют пострадавшему. Виновника происшествия определяют на основании схемы ДТП и прочей представленной участниками случившегося информации. Если план аварии составлен неверно, разобраться в том, какие действия повлекли возникновение ДТП, сложно. Это дает страховой компании право отказаться предоставлять выплаты.
Денежные средства предоставляют пострадавшему. Виновника происшествия определяют на основании схемы ДТП и прочей представленной участниками случившегося информации. Если план аварии составлен неверно, разобраться в том, какие действия повлекли возникновение ДТП, сложно. Это дает страховой компании право отказаться предоставлять выплаты.
В правильности оформления схемы ДТП в первую очередь заинтересован гражданин, который не является виновником происшествия. Поэтому важно грамотно фиксировать особенности случившегося на бумаге. Дополнительно проводится фото и видеосъемка.
| Вопрос | Ответ |
|---|---|
| Можно ли составить схему ДТП самостоятельно? | Да, если авария оформляется по европротоколу. |
| Что будет, если допустить ошибки в схеме ДТП? | Страховщик может отказаться предоставлять возмещение. |
| Как упростить процедуру составления схемы дорожно-транспортного происшествия? | Воспользоваться онлайн ресурсами, где с помощью готовых элементов обозначить особенности случившегося. |
| Можно ли воспользоваться типовой схемой ДТП? | Да, если она подходит к сложившейся ситуации. |
| Что будет, если отказаться подписывать схему ДТП, составленную представителем Госавтоинспекции? | Происшествие зафиксируют с привлечением понятых или произведут видеосъемку отказа (пункт 282 приказа МВД №664). |
Как группироваться и где держать руки и ноги, если ДТП неизбежно? | Практические советы | Авто
Автомобили обладают системами пассивной и активной безопасности и способны защитить водителя и пассажиров даже при лобовых столкновениях. Правда, люди тоже должны уметь держаться правильно, чтобы не увеличивать вероятность тяжелых травм.
В самолетах перед вылетом проводится инструктаж о том, как пассажирам необходимо вести себя в критических ситуациях. Стюардессы показывают, как правильно пристегиваться перед вылетом и группироваться во время жесткой посадки. Однако некому озвучивать технику безопасности автомобилистам.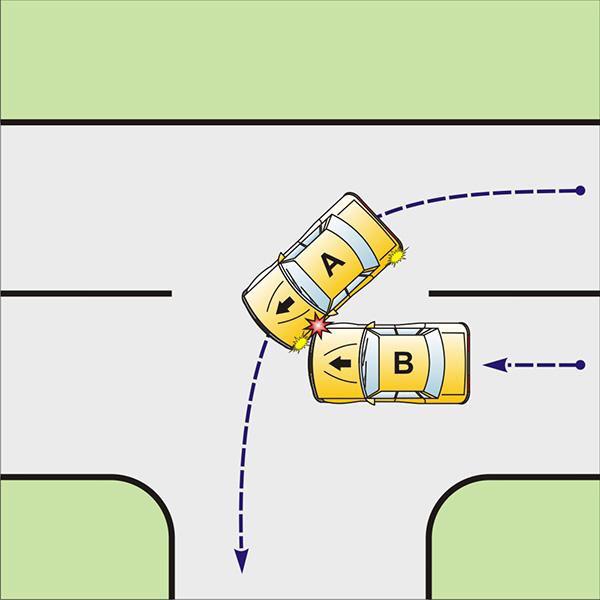 В автошколах эта теория дается мельком, а пассажиры и вовсе о ней не знают. В итоге они, как правило, совсем не имеют представления о том, как вести себя в автомобиле в критических ситуациях, однако получить травмы они рискуют не меньше, чем водители. Уже хорошо, что просто удается уговорить их пристегнуться.
В автошколах эта теория дается мельком, а пассажиры и вовсе о ней не знают. В итоге они, как правило, совсем не имеют представления о том, как вести себя в автомобиле в критических ситуациях, однако получить травмы они рискуют не меньше, чем водители. Уже хорошо, что просто удается уговорить их пристегнуться.
Как же правильно группироваться за пару секунд ло аварии с целью минимизировать вред от столкновения, рассказывает капитан раллийной команды «Газ Рейд Спорт» Вячеслав Субботин.
Ошибки пассажиров и водителя
Пассажиры редко задумываются о том, как правильно вести себя в машине. Многие сидят расслабленно, не следят за дорожной обстановкой, а некоторые даже скидывают ремень безопасности с плеч и ложатся спать.
С точки зрения безопасности водитель находится в более выигрышной ситуации. Он всегда настороже и видит развитие событий вокруг. Он держится за руль и всегда сгруппирован. Его мышцы напрягаются и усиливают кости спины и шеи. Поэтому на нем лежит обязанность следить за поведением своих пассажиров.
Автомобиль, полный людей, необходимо вести аккуратно и не лихачить. Однако если возникает критическая ситуация, то очень важно водителю дать предупреждение перед неизбежным столкновением. Водитель обязан всех предупредить о неминуемом столкновении и чем громче, тем лучше. Обычно это происходит в виде брани, но лучше выдать еще и команду к действию: «Ребята, держитесь, сейчас перевернемся!» Этот возглас привлечет внимание всех к ситуации и, возможно, спасет от опасных травм.
Беда пассажиров в том, что они не знают, куда в этой ситуации деть руки и ноги. Чаще всего они рефлекторно раскрывают их в стороны, упираются в спинки сидений или держатся ладонями за переднюю панель и двери. Однако делать это категорически нельзя.
Дело в том, что при ударе растопыренные руки принимают главный удар на себя. Вес тела многократно увеличивается из-за перегрузки и концентрированно давит на лучевую кость и запястье, из-за чего у пассажиров часты переломы рук даже при самых мелких столкновениях. В особенности опасно, если человек не пристегнулся. Он не только ломает руки при упоре, но и бьется головой как о кузов, так и о своих попутчиков.
В особенности опасно, если человек не пристегнулся. Он не только ломает руки при упоре, но и бьется головой как о кузов, так и о своих попутчиков. На раллийных машинах даже ставятся специальные сетки, которые «улавливают» руки, чтобы не дать им выскочить за пределы кузова. Эти устройства способны спасти людей от тяжелых травм.
Как же правильно группироваться?
Ни в коем случае нельзя держаться за рукоятки дверей, за стойки или панели кузова. Нельзя упираться руками или ногами в переднюю панель машины, в кресла или в переднюю стенку. Именно оттуда приходят очень сильные удары, способные обернуться травмами.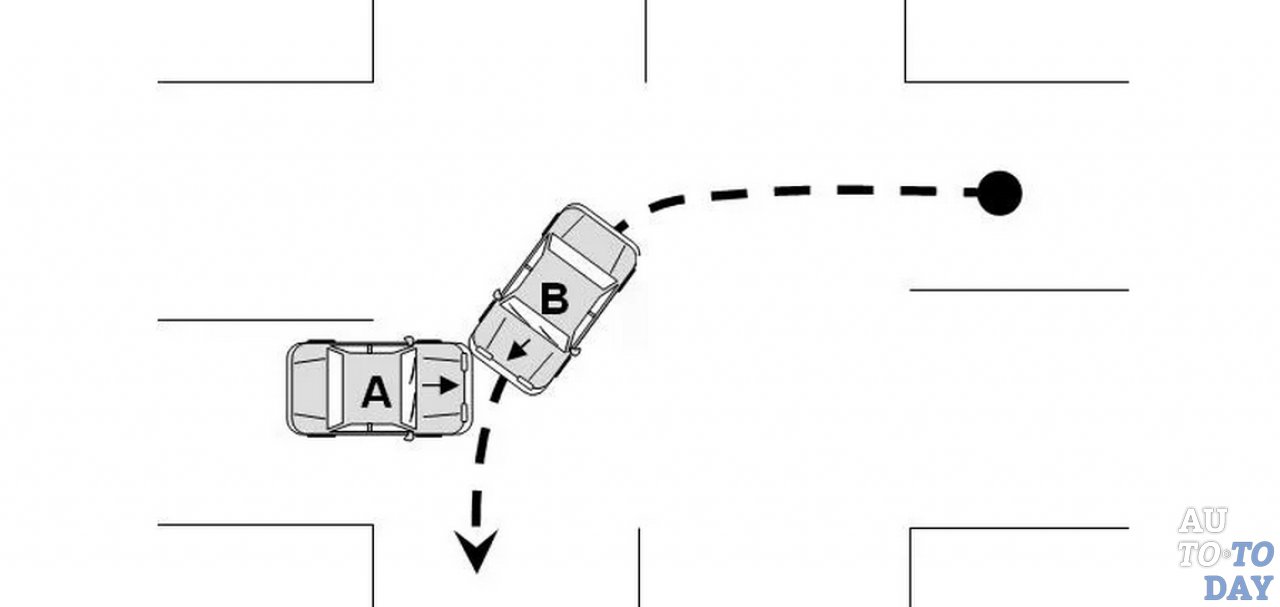
Водитель тоже не должен слишком сильно упираться ногами в площадку слева от педалей. Левая нога там оказывается под угрозой перелома. Перед моментом столкновения ему можно даже выпустить из рук руль, чтобы не получить удар в предплечье. А вот после столкновения можно уже вновь хвататься за баранку, чтобы уклониться от последующих столкновений и продолжать тормозить.
Пассажирам за несколько мгновений до аварии необходимо схватиться за ремень безопасности у себя на груди и сложить руки крест-накрест. При столкновении ремень способен удержать человека в кресле, а в современных машинах ему на помощь придут аэрбеги. Огромное значение играют и сминаемые зоны кузова, которые гасят удары и поглощают энергию столкновения. Сейчас практически все новые автомобили имеют пятизвездочный рейтинг Euro NCAP. При правильных действиях травмы могут быть минимальными.
В состоянии шока пассажирам трудно догадаться, как правильно группироваться. Поэтому важно довести эти действия до автоматизма.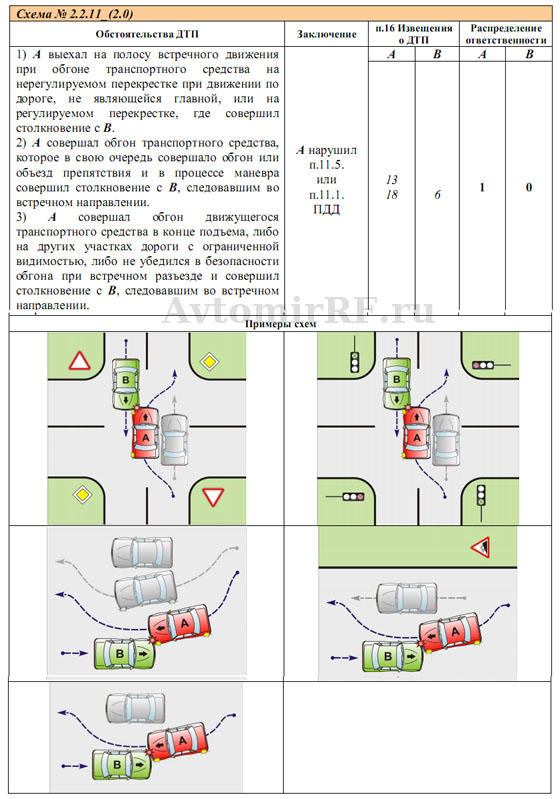
Смотрите также:
разбор ситуаций и ваши действия
Автомобиль стал неотъемлемой частью жизни современного человека. Удобство, быстрота передвижения и экономия времени – это то, из-за чего большинство граждан предпочитают личный транспорт общественному. С каждым годом на дорогах появляется все больше машин, из-за чего количество дорожно-транспортных происшествий также увеличивается.
Для профилактики аварий и обеспечения безопасности на автодорогах большое значение имеют сами действия всех участников движения. Какова модель поведения при автомобильной аварии, что делать, если вы стали участником ДТП, как спастись из тонущей машины – рассмотрим более подробно в данной статье.
В случае возможного ДТП

Даже четкое соблюдения всех правил дорожного движения, большой безаварийный стаж вождения не может гарантировать Вам, что вы никогда не попадете в ДТП. Самое главное это правильно сориентироваться в возникшей ситуации. Не стоит совершать действия, которые могут усугубить ваше положение. Например, покидать место аварии или вступать в конфликт с другими участниками ДТП.
Поведение в случае автомобильной аварии включает в себя следующие действия, которых рекомендуется придерживаться:
- Став участником дорожного происшествия, остановите автомобиль.
- Обозначьте место остановки знаком или включите аварийную сигнализацию
- Помните, что человек, своевольно покинувший место ДТП, автоматически считается виновным.
- При наличии пострадавших, вызовите службу медицинской помощи.
- Постарайтесь оказать доврачебную помощь если кому то она требуется, используя автомобильную аптечку.
- Вопреки расхожему мнению, трогать тяжело раненого человека нельзя. Не пытайтесь доставить его в больницу на своем автомобиле. Лучше дождаться помощи на месте.
- Зафиксируйте на видео или фото положение автомобилей, а также полученные ими повреждения.
- Запишите имена и контакты возможных свидетелей.
- При наличии жертв или участия в ДТП более 2 машин вызов службы ГИБДД обязателен.
- Не забудьте обратиться в страховую компанию.
- До приезда ГИБДД ничего не трогайте на месте аварии. Не убирайте стекла или отлетевшие части машины, не меняйте их местоположения.
- Если вам предлагают пройти тест на алкоголь, то не отказывайтесь. Если вашей вины в аварии нет, то медицинское освидетельствование лишь подтвердит вашу правоту.
- Если вы не согласны с действиями сотрудников ГИБДД, то вы имеет право внести свои замечания в протокол. Просите 2 экземпляр на месте. С ним вы можете обратиться в суд. В крайнем случае, при подписании протокола вы можете его сфотографировать.
 Просите 2 экземпляр на месте. С ним вы можете обратиться в суд. В крайнем случае, при подписании протокола вы можете его сфотографировать.
Просите 2 экземпляр на месте. С ним вы можете обратиться в суд. В крайнем случае, при подписании протокола вы можете его сфотографировать.Несмотря на то, что ситуации ДТП крайне неприятная и процедура ее оформления может занимать продолжительное время, контролируйте свои эмоции. Ваша агрессия или излишняя эмоциональность впоследствии может быть использована против вас.
При столкновении
Как правильно себя вести в случаи ДТПВ случаи неизбежности столкновения самой большой ошибкой станет попытаться покинуть автомобиль на ходу. Не нужно бросать руль. Пытайтесь смягчить негативные последствия до самого момента аварии. Сохраняя самообладание, попытайтесь изменить траекторию движения, превратив центральный удар в боковой. Помните, что съехать в кювет или столкнуться с деревом или другим недвижимым препятствием лучше, чем столкнуться с идущей на большой скорости машине.
Правила поведения при аварии на автомобильном транспорте предусматривают следующие действия, которые увеличат шансы на выживание при столкновении:
- Сопротивляйтесь перемещению вашего тела вперед, для этого используйте пол для опоры.
- Защищая голову, сложите руки крест – накрест на руль или переднюю панель, между ними положите голову.
- Напрягите насколько возможно все мышцы тела
- Людям на заднем сиденье рекомендуется закрыть голову и завалиться набок, или упасть на пол.
- При наличии подушки безопасности, прислонитесь к рулю грудной клеткой
- При наличии ребенка в салоне, необходимо закрыть его собой и принять с ним боковое положение.
- До 12 лет запрещено садиться на переднее сиденье. Это обусловлено тем, что при столкновении двери могут получить сильные повреждения, и выбираться из салона нужно будет через лобовое стекло.
После автомобильной аварии оцените ситуацию. Необходимо выяснить в каком состоянии находится сама машина. Есть ли утечки бензина, возгорания, искры или подозрительный запах. При возможности следует немедленно покинуть салон.
Если машина оказалась в перевернутом состоянии, то прежде, чем покидать автомобиль убедитесь в отсутствии возможности повторного переворота.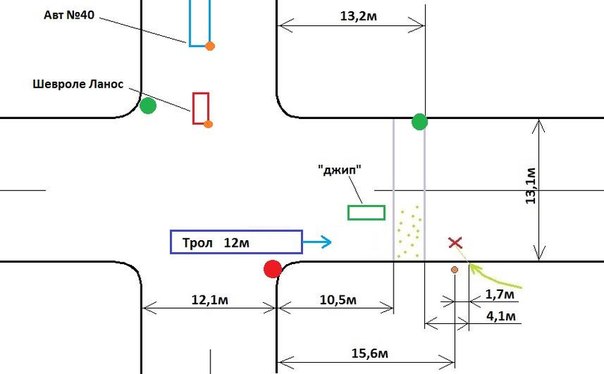 Также рискованно раскачивать своими движениями машину, если вы находитесь на крутом склоне или рядом с обрывом. В таких ситуациях, лучше не двигаться и дождаться профессиональной помощи.
Также рискованно раскачивать своими движениями машину, если вы находитесь на крутом склоне или рядом с обрывом. В таких ситуациях, лучше не двигаться и дождаться профессиональной помощи.
Если существует риск возгорания или взрыва, то выбираться из неустойчивой машины следует крайне осторожно. Используйте окна, которые направлены на вершину склона. Выбравший из салона пассажир должен помочь оставшимся пострадавшим.
Только после того, как в салоне никого не останется, следует отойти на безопасное расстояние. Зажатых людей в машине не следует вытаскивать, применяя силу. Вызовите спасателей и скорую помощь.
Если автомобиль упал в водоем
Автомобиль некоторое время будет находиться на поверхности воды, поэтому следует использовать время по – максимуму. Не паникуйте. Именно паника может спровоцировать лишние и ненужные действия. Выбираться из тонущего транспортного средства следует через окна.
Если вы попытаетесь открыть двери, то машина затонет гораздо быстрее.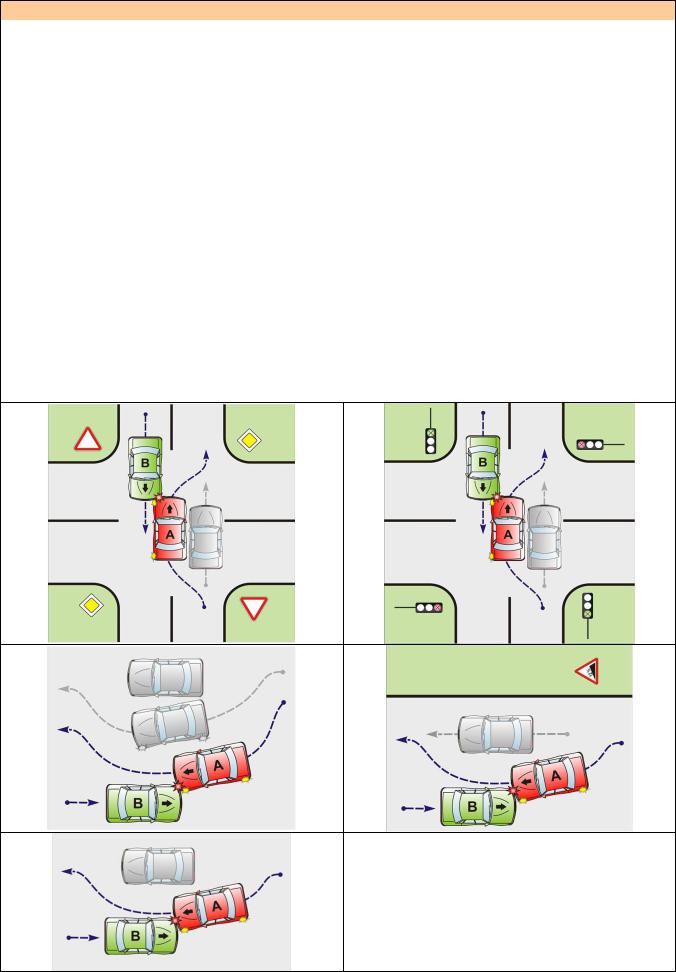 Даже если вам не удалось покинуть салон, пока машина была на плаву, не стоит прекращать попыток спастись. Включите фары. Они осветит вам путь на поверхность. Кроме того, впоследствии это поможет вам отыскать свой автомобиль для поднятия из воды.
Даже если вам не удалось покинуть салон, пока машина была на плаву, не стоит прекращать попыток спастись. Включите фары. Они осветит вам путь на поверхность. Кроме того, впоследствии это поможет вам отыскать свой автомобиль для поднятия из воды.
Дождитесь, пока салон наполнится водой наполовину, отталкивайтесь от корпуса и резко всплывайте. Не забудьте взять с собой важные документы. Даже, если машина полностью опустится на дно, но окна и двери будут закрыты, воздуха вам хватит на несколько минут.
Выбравшись на берег, вызовите в скорую службу. В экстремальных ситуациях человек не может адекватно оценить свое самочувствие, поэтому осмотр у специалистов обязателен.
Профилактика ДТП
Причины дорожно-транспортных происшествийДля того чтобы минимизировать шансы оказаться участником ДТП следует придерживаться следующих рекомендаций:
- Регулярно проходить технический осмотр транспортного средства
- Не пользоваться автомобилям при неисправностях. Даже, если они вам кажутся незначительными.
- Не забывать про ремень безопасности
- Своевременно пополнять запас медицинской аптечки. Проверять медикаменты на срок годности.
- В салоне иметь любой тяжелый предмет. С его помощью в случае необходимости можно легко разбить окна.
- Не употреблять спиртосодержащие напитки, если вы – водитель.
- Не осуществляйте на личном транспорте горючие или легковоспламеняющиеся грузы.
- Стараться уйти от прямого столкновения до последнего момента.
- Следуйте основному принципу в ситуации аварии – быть как можно ниже и занимать, как можно меньше места. Сгруппируйтесь.
 Даже, если они вам кажутся незначительными.
Даже, если они вам кажутся незначительными.Следует объяснить детям правила поведения при аварии на автомобильном транспорте. Не разрешайте сидеть в салоне без специального кресла. Запретите малолетним пассажирам крутить ручки дверей или играть с электронными устройствами установленными в автомобиле. Используйте центральный замок и блокировку поднятия стекол. Помните: за последствия, отвечать будете вы, а не ребенок.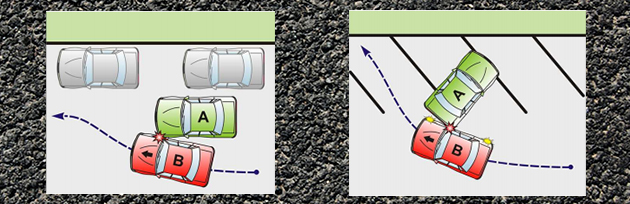
Алгоритм безопасного предотвращения столкновений, основанный на комплексных характеристиках
Ориентируясь на требования системы предотвращения столкновений безопасности транспортных средств, предлагается алгоритм безопасного предотвращения столкновений, основанный на характеристиках окружающей среды и характеристиках водителя. Модель времени безопасности создается путем анализа взаимосвязи между временем предотвращения столкновения и окружающей средой. В установленную модель безопасного времени добавлены параметры, основанные на характеристиках драйвера, что увеличивает гибкость алгоритма.Алгоритм может адаптироваться к большему количеству различных условий вождения и выдавать соответствующие пороги предупреждения. После моделирования и сравнения с другими алгоритмами алгоритм, предложенный в этой статье, может удовлетворить требования по снижению риска столкновения транспортных средств. Проверяется эффективность и выполнимость алгоритма, а безопасность вождения транспортного средства может быть повышена.
1. Введение
С вступлением в 21 век количество транспортных средств росло в геометрической прогрессии, а количество транспортных средств и водителей еще больше увеличилось [1].Как снизить количество смертей в ДТП и экономических потерь стало важным вопросом в контексте такого большого количества транспортных средств [2].
В последние годы были проведены некоторые исследования алгоритма предупреждения о столкновении. Существующие алгоритмы предупреждения о столкновении в основном делятся на две категории, а именно, алгоритм безопасного времени и алгоритм безопасного расстояния [3]. Логический алгоритм времени безопасности сравнивает время столкновения между двумя мастерскими с пороговым значением времени безопасности, чтобы определить состояние безопасности.Алгоритм безопасного времени в основном использует в качестве объекта исследования время до столкновения (TTC) [4]. Модель безопасного расстояния относится к минимальному расстоянию между транспортным средством и препятствием, которое также является расстоянием, которое транспортное средство должно выдерживать, чтобы избежать столкновения с препятствием в текущих условиях транспортного средства [5].
Однако ни модель TTC, ни модель безопасного расстояния не являются достаточно гибкими, чтобы адаптироваться к различным ситуациям во время вождения [6]. Поскольку транспортная среда очень сложна, водители, пешеходы, дороги и окружающая среда — все это факторы, которые создают сложную транспортную среду [7].Для одного и того же водителя разные погодные условия, такие как дождь, снег и туман [8], будут предъявлять разные требования к водителю; напротив, в одной и той же среде разные водители сильно различаются по возрасту, привычкам вождения, навыкам вождения, индивидуальным особенностям и другим факторам [9]. Различия также могут быть сложными, изменчивыми во времени и непредсказуемыми; поэтому существующий алгоритм предотвращения столкновений не подходит для прямого применения [10]. Совершенно необходимо разработать алгоритм предотвращения столкновений, который учитывает условия окружающей среды и характеристики водителя, чтобы соответствовать потребностям различных ситуаций [11].
Основанный на алгоритме предотвращения столкновений времени TTC предотвращения столкновений, в этой статье предлагается алгоритм безопасного предотвращения столкновений, который адаптируется к характеристикам окружающей среды и характеристикам водителя. Алгоритм, предложенный в этой статье, всесторонне учитывает характеристики водителя и характеристики окружающей среды, вводит параметры окружающей среды, возраст и другие переменные и дает соответствующие веса. По сравнению с предыдущими алгоритмами этот алгоритм имеет более высокую адаптируемость и гибкость в сложных условиях, что очень помогает повысить безопасность и эффективность движения.Алгоритм моделируется MATLAB и VISSIUM, и эффективность алгоритма проверена.
2. Классический алгоритм
2.1. Mazda Algorithm
Алгоритм использует алгоритм, основанный на кинематическом анализе, для определения критического тормозного пути. Однако рассчитанное расстояние слишком консервативно для торможения и должно использоваться как критическое расстояние предупреждения [12].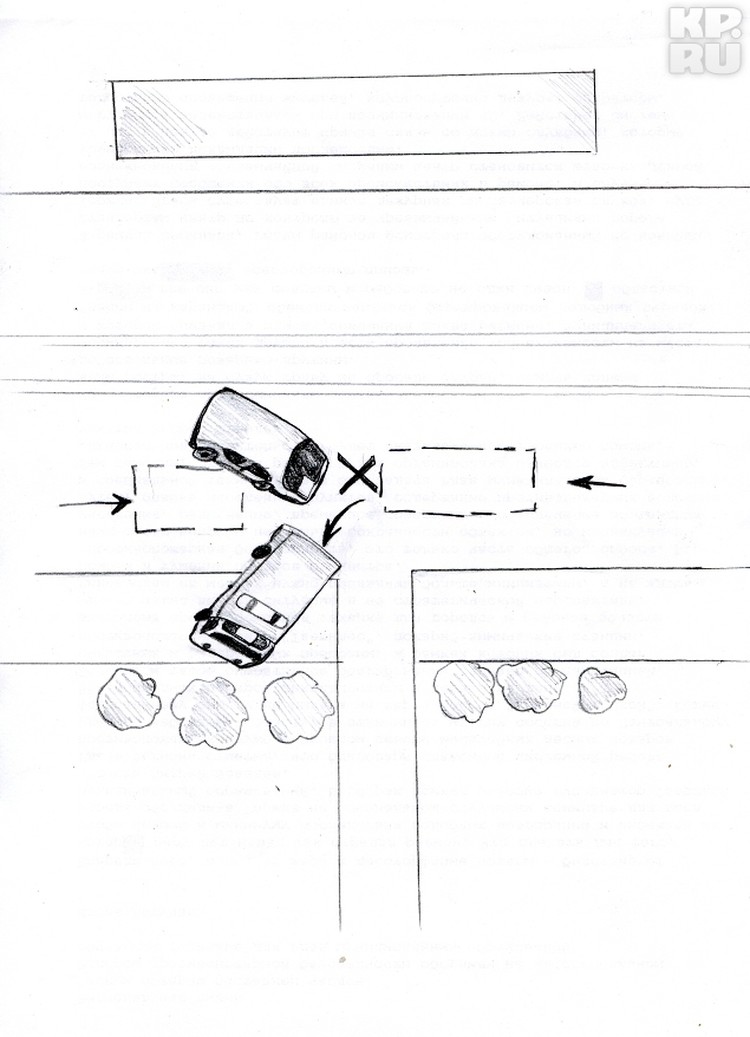 Существует критическое расстояние срабатывания сигнализации: где d 0 — расстояние смещения головы, — это скорость заднего автомобиля, — относительная скорость между автомобилями, t 1 — системная задержка, t 2 — время реакции водителя, a 1 — максимальное торможение заднего автомобиля, а a 2 — максимальное торможение переднего автомобиля.
Существует критическое расстояние срабатывания сигнализации: где d 0 — расстояние смещения головы, — это скорость заднего автомобиля, — относительная скорость между автомобилями, t 1 — системная задержка, t 2 — время реакции водителя, a 1 — максимальное торможение заднего автомобиля, а a 2 — максимальное торможение переднего автомобиля.
Алгоритм предполагает, что предыдущее транспортное средство начинает торможение при максимальном замедлении, и по истечении времени задержки системы и времени реакции водителя хвостовое транспортное средство начинает тормозить при максимальном замедлении. Чтобы сделать алгоритм более строгим, расстояние смещения головы добавляется к уравнению (1) для совместного выполнения вычислений.
2.2. Алгоритм Беркли
Алгоритм основан на алгоритме Mazda и был улучшен, и приводится уравнение критического расстояния срабатывания сигнализации (2): где d 0 — расстояние смещения головы, — это скорость заднего транспортного средства, — относительная скорость между транспортными средствами, t 1 — системная задержка, t 2 — время реакции водителя и a — максимальное замедление тормоза транспортного средства.
Алгоритм был улучшен на основе алгоритма Mazda для получения более консервативного расстояния предупреждения, чем Mazda. Предупреждение дается в виде безразмерного предупреждающего значения ψ , которое определяется следующим образом:
В уравнении (3) d — текущее расстояние между двумя автомобилями, D b — критическое торможение. расстояние, а D b рассчитывается следующим образом:
Когда значение ψ постепенно увеличивается, увеличивается риск столкновения; когда значение ψ уменьшается, риск столкновения уменьшается.Когда ψ > 1, это означает, что в настоящее время риска столкновения нет [13, 14].
2.3. Алгоритм Honda
Алгоритм Honda представляет собой уравнение критического расстояния срабатывания сигнализации (5), основанное на экспериментально полученных данных:
Расстояние напоминания о предельном значении D j Уравнение выглядит следующим образом: где t 1 время, необходимое для процесса задержки системы, t 2 — время, необходимое для торможения системы, — собственная скорость транспортного средства, — текущая скорость транспортного средства предыдущего транспортного средства, a 1 — максимальное замедление собственного транспортного средства, а a 2 — максимальное замедление предыдущего транспортного средства. Поскольку модель Honda делится на критическое значение и предельное значение расстояния напоминания, а параметры настраиваются и улучшаются в соответствии с большим количеством экспериментальных данных; на конечный результат модели драйверный фактор меньше влияет. Однако модель предъявляет высокие требования к выборочным данным. Необходимо многократно рассчитывать и экспериментировать с большим объемом выборочных данных, чтобы гарантировать точность модели и соответствие результатов реальной ситуации вождения.Если выборка не репрезентативна или размер выборки небольшой, выходные данные будут серьезно отличаться от реальной дорожной ситуации [15–18].
Поскольку модель Honda делится на критическое значение и предельное значение расстояния напоминания, а параметры настраиваются и улучшаются в соответствии с большим количеством экспериментальных данных; на конечный результат модели драйверный фактор меньше влияет. Однако модель предъявляет высокие требования к выборочным данным. Необходимо многократно рассчитывать и экспериментировать с большим объемом выборочных данных, чтобы гарантировать точность модели и соответствие результатов реальной ситуации вождения.Если выборка не репрезентативна или размер выборки небольшой, выходные данные будут серьезно отличаться от реальной дорожной ситуации [15–18].
3. Сбор информации и преобразование систем координат
3.1. Сбор информации о вождении
Благодаря технологии сбора данных, основанной на Интернете транспортных средств, после того, как транспортное средство оснащено выделенной связью ближнего действия (DSRC) и глобальной системой позиционирования (GPS) [19], датчик транспортного средства обеспечивает управление транспортным средством скорость, координаты широты и долготы GPS, угол курса и параметры рабочего состояния автомобиля [20].
DSRC — это эффективная технология беспроводной связи, которая может быстро определять высокоскоростные движущиеся цели и двустороннюю связь на небольшом расстоянии [21], обеспечивая беспроводную связь между транспортными средствами и транспортными средствами, а также транспортными средствами и дорогами в интеллектуальных транспортных системах [22]. DSRC может обеспечить высокую скорость передачи данных, обеспечивая низкую задержку и низкий уровень помех в процессе передачи [23]. Кроме того, DSRC может быстро передавать большой объем информации в реальном времени в интеллектуальной транспортной системе [24].Информацию об окружающей дорожной среде можно получить путем косвенного запроса к базе данных [25]. Информацию о дорожном движении можно разделить на информацию о статической дорожной сети и динамическую информацию о дорожной сети по частоте данных, собранных из источника информации. Чтобы удовлетворить требование взаимодействия информации об автомобилях в реальном времени, необходимо определить частоту обновления информации, учитывая частоту изменения информации [26]. Применение технологии DSRC в интеллектуальной транспортной системе повышает эффективность передвижения людей.DSRC может установить связь между автомобилем и дорогой, предоставить оптимизированный маршрут движения в реальном времени в соответствии с дорожными условиями и снизить нагрузку на транспорт. Он также может устанавливать связь между транспортными средствами, подсказывать безопасное расстояние между транспортными средствами, заранее предупреждать об авариях перед движущимся транспортом и улучшать коэффициент безопасности движения.
Применение технологии DSRC в интеллектуальной транспортной системе повышает эффективность передвижения людей.DSRC может установить связь между автомобилем и дорогой, предоставить оптимизированный маршрут движения в реальном времени в соответствии с дорожными условиями и снизить нагрузку на транспорт. Он также может устанавливать связь между транспортными средствами, подсказывать безопасное расстояние между транспортными средствами, заранее предупреждать об авариях перед движущимся транспортом и улучшать коэффициент безопасности движения.
Соответствующие данные о транспортном средстве включают в себя не только информацию о движении, такую как скорость движения, координаты GPS и угол курса, но также информацию о рабочих условиях самого транспортного средства, например, давление в шинах и остаток топлива [27].Эту информацию можно получить от собственных датчиков транспортного средства и электронного блока управления (ЭБУ), а координаты местоположения и направление транспортного средства можно получить с помощью системы навигации и определения местоположения GPS [28]. В шине сети контроллеров (CAN) автомобиля можно получить параметры транспортного средства, чтобы определить, находится ли транспортное средство в аварийном состоянии, например, давление в шинах транспортного средства и нехватка масла [29], и подсказка будет задано в терминальной системе. Затем, благодаря получению в реальном времени информации о состоянии автомобиля и соседнего автомобиля, включая информацию о широте, долготе, скорости и углу курса транспортного средства, эти данные вводятся в алгоритм предотвращения столкновений для обработки и предупреждения. когда есть опасность.
В шине сети контроллеров (CAN) автомобиля можно получить параметры транспортного средства, чтобы определить, находится ли транспортное средство в аварийном состоянии, например, давление в шинах транспортного средства и нехватка масла [29], и подсказка будет задано в терминальной системе. Затем, благодаря получению в реальном времени информации о состоянии автомобиля и соседнего автомобиля, включая информацию о широте, долготе, скорости и углу курса транспортного средства, эти данные вводятся в алгоритм предотвращения столкновений для обработки и предупреждения. когда есть опасность.
3.2. Создание гауссовой системы координат в плоскости
Информация о местоположении, обычно принимаемая оборудованием транспортного средства, представлена в форме широты и долготы, обычно с использованием координат Всемирной геодезической системы-1984 (WGS-84). Поскольку координаты формы широты и долготы имеют положительные значения и отрицательные значения на абсциссе одной и той же зоны проекции, расчет относительного расстояния между транспортными средствами на плоскости обработки и создание модели транспортного средства очень сложны [30] .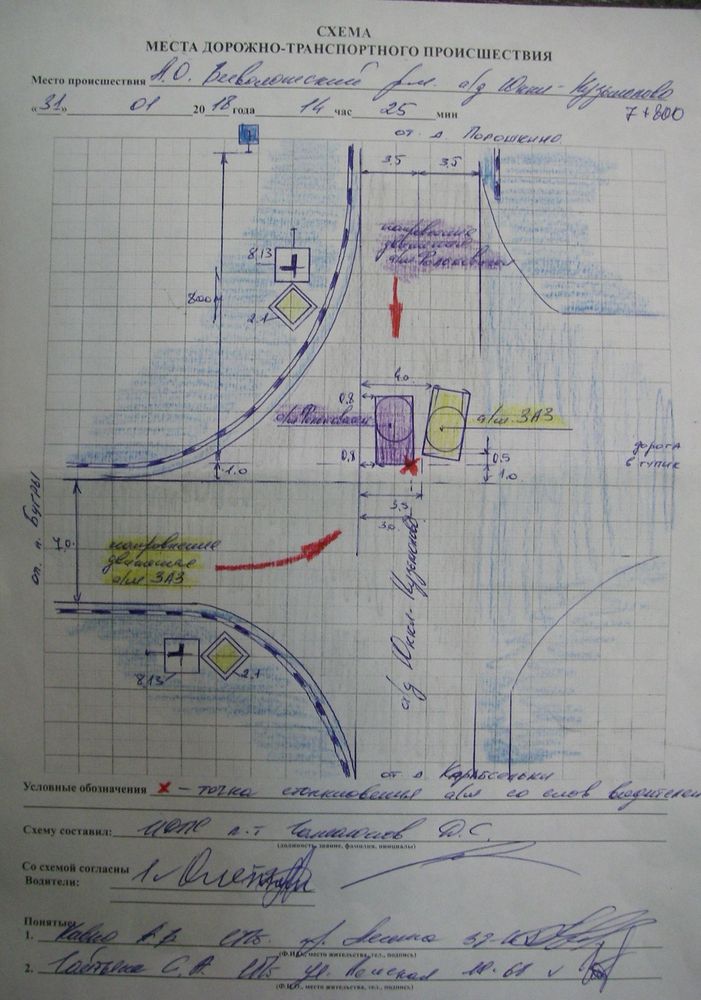 Система предотвращения столкновений Gau
Система предотвращения столкновений Gau
— Infogalactic: ядро планетарных знаний
Артикул устаревший . Обновите эту статью, чтобы отразить недавние события или новую доступную информацию. (декабрь 2013 г.) |
Система предотвращения столкновений — это автомобильная система безопасности, предназначенная для снижения серьезности аварии. Также известная как система предупреждения о столкновении , система предупреждения о лобовом столкновении , или система смягчения столкновений , она использует радар (всепогодный), а иногда и лазер и камеру (оба типа датчиков неэффективны в плохую погоду) для обнаружения неминуемой аварии.После того, как обнаружение выполнено, эти системы либо выдают предупреждение водителю о неизбежном столкновении, либо принимают меры автономно без какого-либо вмешательства водителя (путем торможения или рулевого управления, либо и того, и другого).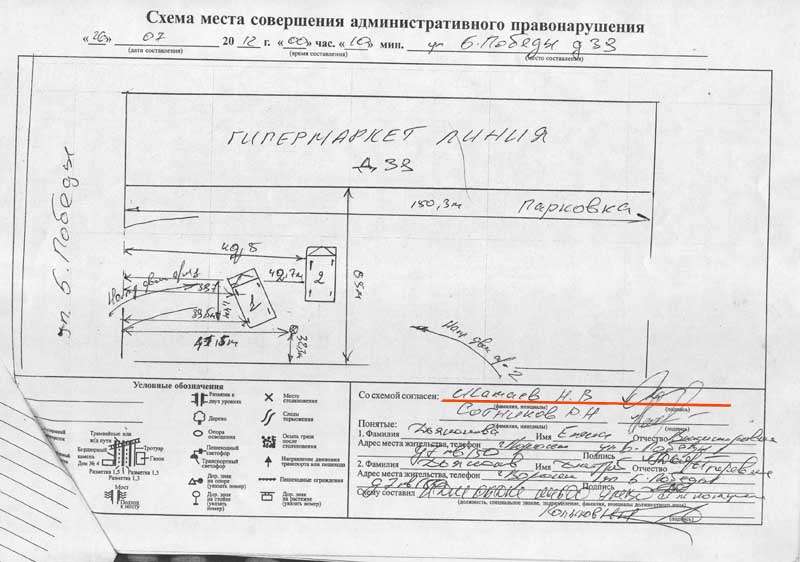 Предотвращение столкновения с помощью торможения целесообразно на низких скоростях транспортного средства (например, ниже 50 км / ч), а предотвращение столкновения с помощью рулевого управления — на более высоких скоростях транспортного средства. [1] Автомобили с системой предотвращения столкновений также могут быть оснащены адаптивным круиз-контролем и использовать те же датчики дальнего обзора.
Предотвращение столкновения с помощью торможения целесообразно на низких скоростях транспортного средства (например, ниже 50 км / ч), а предотвращение столкновения с помощью рулевого управления — на более высоких скоростях транспортного средства. [1] Автомобили с системой предотвращения столкновений также могут быть оснащены адаптивным круиз-контролем и использовать те же датчики дальнего обзора.
История
Первая в мире демонстрация предотвращения лобового столкновения была проведена в 1995 году группой ученых и инженеров из исследовательских лабораторий Hughes в Малибу, Калифорния. Проект финансировался Delco Electronics и возглавлялся физиком HRL Росс Д. Олни. В маркетинговых целях технология была помечена как ПРЕДУПРЕЖДЕНИЕ. Система была основана на радаре — технологии, которая была легко доступна в Hughes Electronics, но практически нигде в мире.Специально изготовленная на заказ радиолокационная головка была разработана специально для этого автомобильного приложения на частоте 77 ГГц. Передняя радиолокационная головка, а также блок обработки сигналов и визуально-аудио-тактильная обратная связь были сначала интегрированы в Lexus SC400, а вскоре после этого в Cadillac STS. [2] Концептуальный автомобиль в стиле внедорожника, известный как SSC (Safety Security & Communications), который содержал многие другие самые передовые технологии Delco, [3] также получил систему предотвращения столкновений FOREWARN и был показан публике для впервые на Североамериканском международном автосалоне в Кобо-холле в Детройте в 1996 году.Это был полностью функциональный автомобиль, и одновременно для демонстрации использовался его дубликат. [4] [5] Хотя в первую очередь это система предупреждения с различными обратными связями, система имела незначительный контроль над тормозами, которые подавались импульсами, чтобы начать тормозное действие в случае потенциального столкновения, что также послужило началом систем предотвращения. Эти автомобили SSC были отправлены по всему миру, в том числе в Европу и Азию, чтобы поделиться этой очень важной жизненно важной технологией со всеми основными производителями автомобилей в попытке быстро начать свои индивидуальные разработки.
Передняя радиолокационная головка, а также блок обработки сигналов и визуально-аудио-тактильная обратная связь были сначала интегрированы в Lexus SC400, а вскоре после этого в Cadillac STS. [2] Концептуальный автомобиль в стиле внедорожника, известный как SSC (Safety Security & Communications), который содержал многие другие самые передовые технологии Delco, [3] также получил систему предотвращения столкновений FOREWARN и был показан публике для впервые на Североамериканском международном автосалоне в Кобо-холле в Детройте в 1996 году.Это был полностью функциональный автомобиль, и одновременно для демонстрации использовался его дубликат. [4] [5] Хотя в первую очередь это система предупреждения с различными обратными связями, система имела незначительный контроль над тормозами, которые подавались импульсами, чтобы начать тормозное действие в случае потенциального столкновения, что также послужило началом систем предотвращения. Эти автомобили SSC были отправлены по всему миру, в том числе в Европу и Азию, чтобы поделиться этой очень важной жизненно важной технологией со всеми основными производителями автомобилей в попытке быстро начать свои индивидуальные разработки. Потребовалось почти 20 лет, чтобы эта важная технология достигла потребительского рынка.
Потребовалось почти 20 лет, чтобы эта важная технология достигла потребительского рынка.
В начале 2000 года Национальное управление безопасности дорожного движения США (NHTSA) исследовало, следует ли сделать системы предупреждения о лобовых столкновениях и предупреждения о выезде с полосы движения обязательными. [6]
В 2011 году в Европейскую комиссию был направлен вопрос о стимулировании этих систем «смягчения столкновения с помощью торможения». [7] Обязательная установка усовершенствованных систем экстренного торможения на грузовые автомобили будет введена 1 ноября 2013 года для новых типов транспортных средств и 1 ноября 2015 года для всех новых транспортных средств в Европейском Союзе. [8] Это может, согласно оценке воздействия, [9] в конечном итоге предотвратить около 5 000 смертельных случаев и 50 000 серьезных травм в год в странах ЕС.
В исследовании [10] , проведенном в 2012 году Страховым институтом безопасности дорожного движения, изучалось, как определенные особенности систем предотвращения столкновений влияют на количество требований по различным формам страхового покрытия.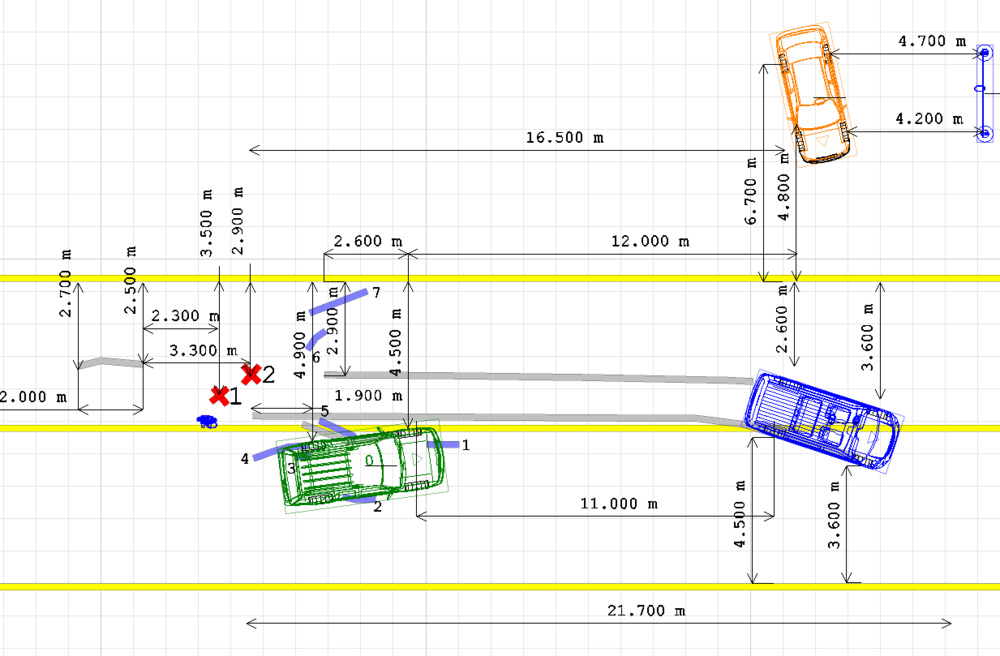 Результаты показывают, что две функции предотвращения столкновений обеспечивают наибольшие преимущества: (а) автономное торможение, , которое тормозило бы само по себе, если водитель этого не делает, чтобы избежать лобового столкновения, и (б) адаптивные фары , которые сместите фары в направлении, которым управляет водитель.Они обнаружили, что системы съезда с полосы движения бесполезны и, возможно, вредны на этапе разработки примерно в 2012 году.
Результаты показывают, что две функции предотвращения столкновений обеспечивают наибольшие преимущества: (а) автономное торможение, , которое тормозило бы само по себе, если водитель этого не делает, чтобы избежать лобового столкновения, и (б) адаптивные фары , которые сместите фары в направлении, которым управляет водитель.Они обнаружили, что системы съезда с полосы движения бесполезны и, возможно, вредны на этапе разработки примерно в 2012 году.
Функции предотвращения столкновений быстро внедряются в новый автопарк.
Производители автомобилей
Audi
2006: На Audi Q7 введена радарная система предупреждения о лобовом столкновении «Braking Guard».
2010: Автономная система экстренного торможения Pre sense использует двойной радар и датчики монокулярной камеры [11] и впервые была представлена в 2010 году на Audi A8 2011 года. [12] «Pre Sense Plus» работает в четыре фазы. Система сначала предупреждает о надвигающейся аварии, включает аварийные огни, закрывает окна и люк в крыше и предварительно натягивает передние ремни безопасности. После предупреждения следует легкое торможение, чтобы привлечь внимание водителя. Третья фаза инициирует автономное частичное торможение со скоростью 3 м / с² (9,8 фут / с²). Четвертая фаза увеличивает торможение до 5 м / с² (16,4 фута / с²), за которым следует автоматическое полное торможение примерно за полсекунды до предполагаемого удара.«Pre Sense Rear» разработан для уменьшения последствий наезда сзади. Люк и окна закрыты, ремни безопасности подготовлены к ударам. Сиденья сдвинуты вперед, чтобы защитить пассажиров.
После предупреждения следует легкое торможение, чтобы привлечь внимание водителя. Третья фаза инициирует автономное частичное торможение со скоростью 3 м / с² (9,8 фут / с²). Четвертая фаза увеличивает торможение до 5 м / с² (16,4 фута / с²), за которым следует автоматическое полное торможение примерно за полсекунды до предполагаемого удара.«Pre Sense Rear» разработан для уменьшения последствий наезда сзади. Люк и окна закрыты, ремни безопасности подготовлены к ударам. Сиденья сдвинуты вперед, чтобы защитить пассажиров.
2015 представил «Помощник по предотвращению движения»: вмешивается в рулевое управление, чтобы помочь водителю избежать препятствия. В случае аварии «Ассистент поворота» отслеживает встречное движение при повороте налево на малых скоростях. В критической ситуации тормозит машину. «Система экстренного торможения при многократном столкновении» использует контролируемые маневры торможения во время аварии, чтобы помочь водителю.Обе системы представлены в 2015 году на втором поколении Q7.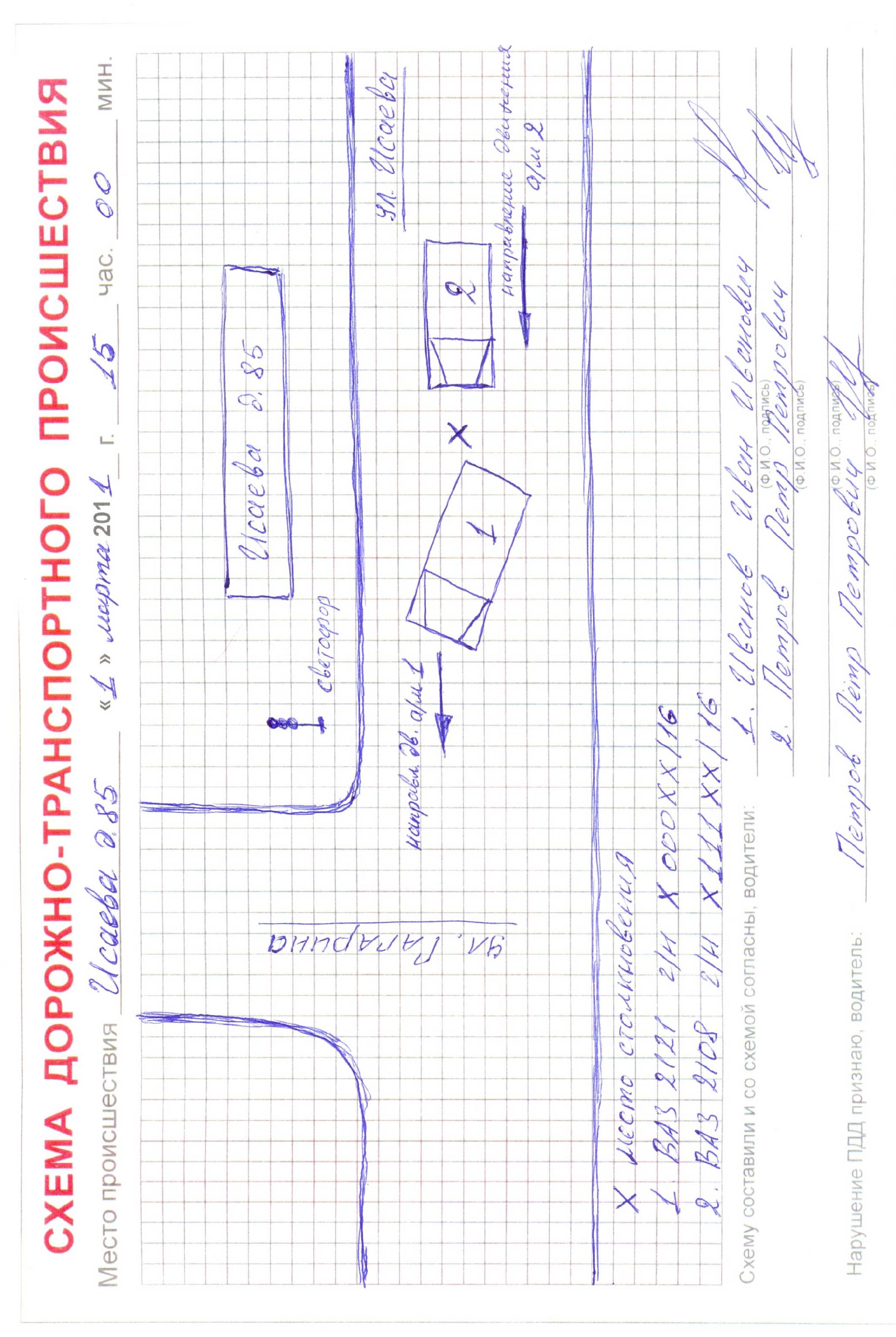 [13]
[13]
БМВ
2012 BMW представила две системы на 7 серии. «Активная защита» обнаруживает неизбежные аварии, предварительно натягивая ремни безопасности, закрывая окна и люк в крыше, поднимая спинку переднего пассажирского сиденья в вертикальное положение и активируя торможение после столкновения. Обнаружение сонливости водителя включает в себя совет сделать перерыв в вождении. «Активный помощник по вождению» сочетает в себе предупреждение о выезде с полосы движения, защиту пешеходов и предотвращение столкновений в городе.
В 2013 году на большинстве моделей был представлен «Ассистент вождения Plus», сочетающий в себе переднюю камеру, систему вылета и в некоторых случаях передние радарные датчики для обнаружения движущихся впереди автомобилей. Если водитель не отреагирует на предупреждение о потенциальном столкновении, система будет постепенно увеличивать тормозное давление и при необходимости применять — с максимальной мощностью торможения. В случае аварии система может остановить автомобиль.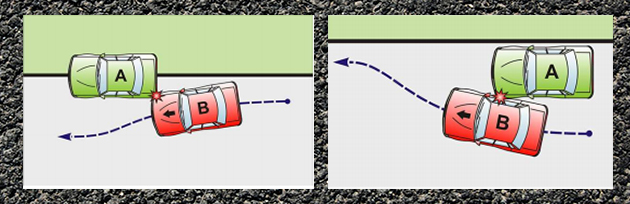
Пакет Driving Assistant Plus также включает в себя «Предупреждение о приближении и пешеходах с активацией городского тормоза».Система обнаруживает движущиеся впереди транспортные средства, а также на скорости до 60 км / ч людей, приближающихся с возможностью столкновения. Водитель предупреждается визуальными и звуковыми сигналами, и если водитель не отреагирует на предупреждение, а диапазон попадает в программное обеспечение, включается торможение, чтобы снизить скорость и помочь смягчить критическую ситуацию.
Более поздние итерации системы на автомобилях, оборудованных системой автоматического круиз-контроля, улучшены за счет объединения обнаружения радара и камеры во время тумана, дождя и других ситуаций, когда нормальная работа камеры может быть нарушена.
Кадиллак
В 2012 году Cadillac представила две системы на Cadillac XTS, которые теперь также доступны на ATS, CTS и Escalade: «Предупреждение о прямом столкновении» использует камеру для обнаружения и предупреждения о возможном столкновении, а «Переднее и заднее» «Автоматическое торможение» для обнаружения неизбежного лобового или заднего столкновения и автоматического торможения для уменьшения силы удара, помогая водителю избежать некоторых ударов на низкой скорости.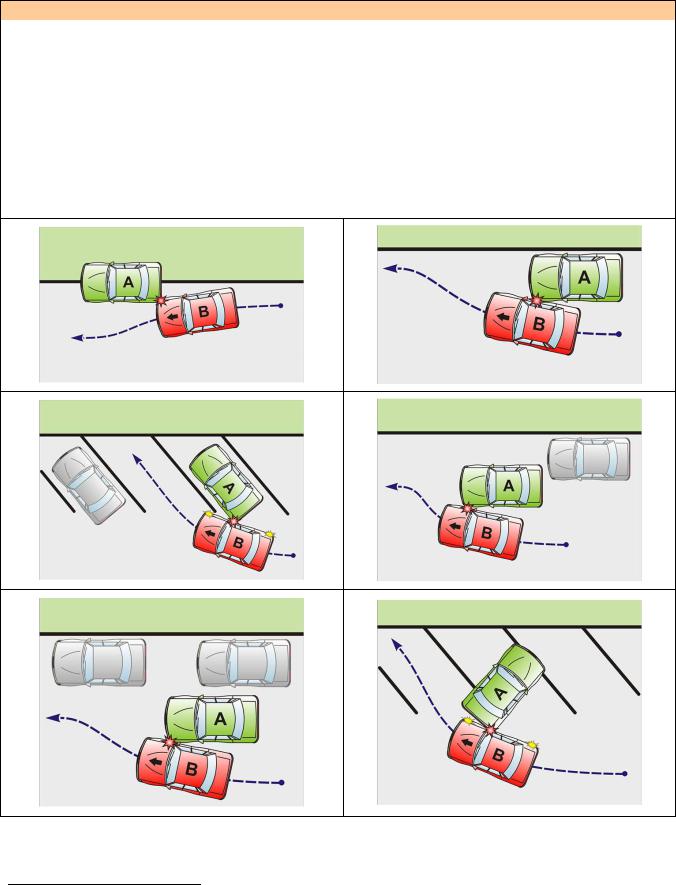 Автоматическое торможение также работает на малых скоростях (в условиях интенсивного движения или даже на парковках и проездах), когда столкновение неизбежно [14]
Автоматическое торможение также работает на малых скоростях (в условиях интенсивного движения или даже на парковках и проездах), когда столкновение неизбежно [14]
Крайслер
2010: Jeep Grand Cherokee 2011 года представил систему предупреждения о лобовом столкновении. [15]
2014: Chrysler 200 и 300 представили систему предупреждения о лобовом столкновении на полной скорости (FCW) с активным торможением. Система подготавливает тормоза и предупреждает водителя о возможном лобовом ударе. Если водитель не реагирует и риск столкновения сохраняется, тормоза могут полностью остановить автомобиль. Advanced Brake Assist автоматически увеличит тормозное усилие, если приложенного усилия недостаточно.
Fiat
Автономная система экстренного торможения Fiat, получившая название City Brake Control , представляет собой городскую систему предотвращения столкновений на низкой скорости, которая работает на скорости от 5 до 30 км / ч. Впервые он был доступен в качестве опции на Panda третьего поколения; он также был доступен на 500L и его вариантах. В системе используется лазерный лидарный датчик, расположенный в верхней части лобового стекла. Если обнаружено надвигающееся столкновение, он вмешивается в три этапа: предварительное заполнение тормозов, повышение чувствительности гидравлического усилителя торможения, и, если водитель все еще не отреагировал, он автоматически включает тормоза и предупреждает пассажиров через зуммер. [16]
Впервые он был доступен в качестве опции на Panda третьего поколения; он также был доступен на 500L и его вариантах. В системе используется лазерный лидарный датчик, расположенный в верхней части лобового стекла. Если обнаружено надвигающееся столкновение, он вмешивается в три этапа: предварительное заполнение тормозов, повышение чувствительности гидравлического усилителя торможения, и, если водитель все еще не отреагировал, он автоматически включает тормоза и предупреждает пассажиров через зуммер. [16]
В 2013 году система City Brake Control была протестирована и признана эффективной Euro NCAP, получив награду Euro NCAP Advanced. [16] [17]
Форд
Система предупреждения о столкновении с тормозной системой на Lincoln MKS 2009 года выпуска В 2009 году компания Ford представила систему предупреждения о столкновении с помощью тормозной системы на Lincoln MKS и MKT, а также на Ford Taurus. [18] Эта система выдает предупреждение на проекционном дисплее, который визуально напоминает стоп-сигналы. Если водитель не реагирует, система предварительно заряжает тормоза и увеличивает чувствительность ассистента торможения, чтобы максимизировать эффективность торможения водителя.Ford продемонстрировал свою технологию предотвращения препятствий, основанную на сочетании датчиков, включая камеру за зеркалом заднего вида, для сканирования дороги на наличие транспортных средств и пешеходов, чтобы уйти, если водитель не предпримет никаких действий. [19]
Если водитель не реагирует, система предварительно заряжает тормоза и увеличивает чувствительность ассистента торможения, чтобы максимизировать эффективность торможения водителя.Ford продемонстрировал свою технологию предотвращения препятствий, основанную на сочетании датчиков, включая камеру за зеркалом заднего вида, для сканирования дороги на наличие транспортных средств и пешеходов, чтобы уйти, если водитель не предпримет никаких действий. [19]
Дженерал Моторс
2012 Система оповещения о столкновении GM введена в внедорожники GMC Terrain и использует камеру для предупреждения, когда впереди идет автомобиль или выезжает за пределы полосы движения [20]
В 2013 году Chevrolet Impala 2014 получила систему экстренного торможения на основе радара и камеры (технология радаров обнаруживает возможную угрозу аварии и предупреждает водителя.Если кажется, что водитель не реагирует достаточно быстро или вообще не реагирует, эта функция вмешивается, чтобы задействовать тормоза, чтобы избежать аварии. Предупреждение о лобовом столкновении, предупреждение о выезде с полосы движения, предупреждение о боковой слепой зоне (используя радарные датчики с обеих сторон автомобиля, система «ищет» другие автомобили в слепых зонах Impala и указывает их присутствие с помощью светодиодных символов в наружные зеркала заднего вида с функцией предупреждения о перекрестном движении [21]
Предупреждение о лобовом столкновении, предупреждение о выезде с полосы движения, предупреждение о боковой слепой зоне (используя радарные датчики с обеих сторон автомобиля, система «ищет» другие автомобили в слепых зонах Impala и указывает их присутствие с помощью светодиодных символов в наружные зеркала заднего вида с функцией предупреждения о перекрестном движении [21]
Chevrolet Malibu 2016 будет оснащен функцией предупреждения о лобовом столкновении с индикатором следующего расстояния, адаптивным круиз-контролем с передним автоматическим торможением и предупреждением о переднем пешеходе с автоматическим торможением в последнюю секунду. [22]
Honda
В 2003 году Honda представила первую предаварийную систему с автономным торможением (Collision Mitigation Brake System CMBS, первоначально CMS) на Inspire [23] и более поздних версиях Acura, используя радиолокационную систему для наблюдения за будущей ситуацией и обеспечьте помощь при торможении, если водитель с недостаточным усилием нажимает на педаль тормоза после предупреждения на комбинации приборов и натяжения ремней безопасности. [24] [25] Система Honda была первой производственной системой, обеспечивающей автоматическое торможение. [25] Система Honda 2003 года также включала «E-Pretensioner», который работал вместе с системой CMBS с электродвигателями на ремнях безопасности. При активации CMBS имеет три ступени предупреждения. Первый этап предупреждения включает звуковые и визуальные предупреждения о торможении. Если проигнорировать, второй этап будет включать натягивание E-Pretensioner за плечевую часть ремня безопасности два-три раза в качестве дополнительного тактильного предупреждения для водителя о необходимости принять меры. Третий этап, на котором CMBS прогнозирует неизбежность столкновения, включает в себя полное ослабление натяжения ремня безопасности E-Pretensioner для более эффективной защиты ремня безопасности и автоматическое торможение для уменьшения серьезности прогнозируемого столкновения.E-Pretensioner также будет работать для уменьшения провисания ремня безопасности всякий раз, когда задействуются тормоза и активируется система помощи при торможении.
[24] [25] Система Honda была первой производственной системой, обеспечивающей автоматическое торможение. [25] Система Honda 2003 года также включала «E-Pretensioner», который работал вместе с системой CMBS с электродвигателями на ремнях безопасности. При активации CMBS имеет три ступени предупреждения. Первый этап предупреждения включает звуковые и визуальные предупреждения о торможении. Если проигнорировать, второй этап будет включать натягивание E-Pretensioner за плечевую часть ремня безопасности два-три раза в качестве дополнительного тактильного предупреждения для водителя о необходимости принять меры. Третий этап, на котором CMBS прогнозирует неизбежность столкновения, включает в себя полное ослабление натяжения ремня безопасности E-Pretensioner для более эффективной защиты ремня безопасности и автоматическое торможение для уменьшения серьезности прогнозируемого столкновения.E-Pretensioner также будет работать для уменьшения провисания ремня безопасности всякий раз, когда задействуются тормоза и активируется система помощи при торможении. [25]
[25]
В конце 2004 года компания Honda разработала систему ночного видения, которая выделяет пешеходов перед автомобилем, предупреждая водителя звуковым сигналом и визуально отображая их через HUD. Система работает только при температуре ниже 30 градусов по Цельсию (86 по Фаренгейту). Эта система впервые появилась на Legend. [26]
Hyundai
Hyundai Genesis DH оснащен функцией автоматического экстренного торможения с использованием радара и камеры на лобовом стекле. [27]
Мазда Система Smart City Brake Support (SCBS) Mazdaиспользует лазеры для обнаружения транспортных средств или препятствий перед автомобилем. [28] Система может задействовать тормоза и снизить мощность двигателя, и если разница в скорости между автомобилем и препятствием составляет 30 км / ч (19 миль в час) или меньше, система может избежать или, по крайней мере, уменьшить потенциальный ущерб от столкновения.
Mazda также имеет более высокоскоростную систему предотвращения столкновений под названием Smart Brake Support (SBS). [29] Эта система использует радар миллиметрового диапазона для обнаружения транспортных средств на расстоянии до 200 метров (660 футов) впереди на скоростях от 15 километров в час (9,3 мили в час) до 145 километров в час (90 миль в час) и предупреждения водителя о потенциальной опасности. столкновение. Если водитель не отвечает, тормоза включаются в два этапа.
[29] Эта система использует радар миллиметрового диапазона для обнаружения транспортных средств на расстоянии до 200 метров (660 футов) впереди на скоростях от 15 километров в час (9,3 мили в час) до 145 километров в час (90 миль в час) и предупреждения водителя о потенциальной опасности. столкновение. Если водитель не отвечает, тормоза включаются в два этапа.
Мерседес-Бенц
В 2002 году система «Pre-Safe» Mercedes была представлена осенью на Парижском автосалоне на автомобиле S-класса 2003 года. Используя электронные датчики контроля устойчивости для измерения угла поворота рулевого колеса, рыскания автомобиля, а также датчики бокового ускорения и экстренного торможения (BAS) для обнаружения экстренного торможения, система может натянуть ремни безопасности, отрегулировать положение сиденья, включая задние сиденья (если они установлены), поднять сложенную заднюю часть подголовники (если установлены) и закройте люк в крыше, если он обнаруживает возможное столкновение (включая опрокидывание). [30] Более поздняя версия системы Pre-Safe была дополнена дополнительной функцией, которая может при необходимости закрывать любые открытые окна.
[30] Более поздняя версия системы Pre-Safe была дополнена дополнительной функцией, которая может при необходимости закрывать любые открытые окна.
В 2005 году «Brake Assist BAS plus» была первой системой предупреждения о лобовом столкновении Mercedes-Benz, представленной на модернизированном W221 S-Class 2006 года. [31] включает автономную систему круиз-контроля и добавляет предупреждение о лобовом столкновении на основе радара.
В 2006 г. «Pre-Safe Brake» на CL-Class C216 [32] была первым частичным автономным торможением (40%, или до 0.4g замедление), если водитель не реагирует на предупреждения BAS Plus и система обнаруживает серьезную опасность аварии. [33] [34]
В 2009 году Mercedes представил на Mercedes-Benz E-Class (W212) первый Pre-Safe Brake с полностью автономным торможением с максимальным тормозным усилием примерно за 0,6 секунды до столкновения. [35]
В 2011 году произошло внедрение радиолокационной системы помощи в классе B (в стандартной комплектации).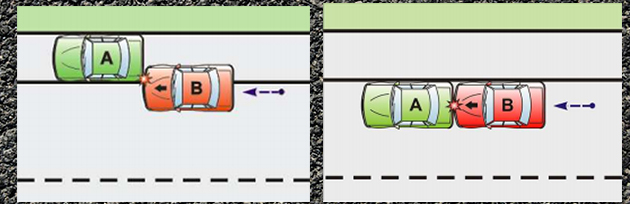 [31]
[31]
В 2013 году Mercedes обновил систему Pre-Safe на модернизированном W222 S-Class как plus с функцией Cross-Traffic Assist. [36] Pre-Safe с функцией обнаружения пешеходов и городским тормозом — это комбинация стереокамеры и радарных датчиков для обнаружения пешеходов перед автомобилем. Визуальные и звуковые предупреждения срабатывают при обнаружении опасности. Если водитель затем отреагирует торможением, мощность торможения будет увеличиваться в зависимости от ситуации, вплоть до полного торможения. Если водитель не реагирует, Pre-Safe Brake запускает автономное торможение транспортного средства. Обнаружение пешеходов активно до прибл.72 км / ч, и способен автономно предотвращать наезды с пешеходами с начальной скорости до 50 км / ч. [36] Радиолокационный датчик в заднем бампере отслеживает движение позади автомобиля. Если обнаруживается риск удара сзади, включаются задние аварийные огни, чтобы предупредить водителя транспортного средства позади (не на автомобилях с кодировкой США / Канады).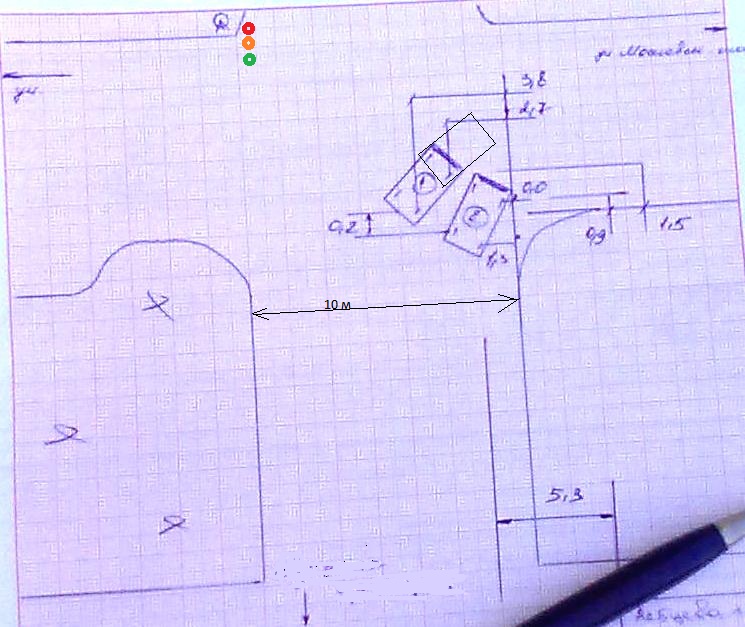 Применяются предупредительные меры защиты пассажиров, такие как двусторонние натяжители ремня безопасности. Если транспортное средство остановлено и водитель желает остаться на месте — нажав педаль тормоза, активировав функцию HOLD или переместив рычаг селектора в положение «P», — система увеличивает тормозное давление, чтобы автомобиль оставался надежно заторможенным во время возможно наезд сзади. [36] Pre-Safe Impulse работает на ранней стадии столкновения, прежде чем результирующее замедление начнет увеличиваться, передние пассажиры отталкиваются от направления удара и глубже садятся на свои сиденья ремнями безопасности. К тому времени, когда авария переходит в фазу пика нагрузки, дополнительное расстояние, на которое они отводятся, может быть использовано при контролируемом рассеивании энергии. Предварительное ускорение и ограничение силы позволяют временно изолировать пассажиров от последствий аварии, значительно снижая риск и тяжесть травм при лобовом столкновении. [36]
Применяются предупредительные меры защиты пассажиров, такие как двусторонние натяжители ремня безопасности. Если транспортное средство остановлено и водитель желает остаться на месте — нажав педаль тормоза, активировав функцию HOLD или переместив рычаг селектора в положение «P», — система увеличивает тормозное давление, чтобы автомобиль оставался надежно заторможенным во время возможно наезд сзади. [36] Pre-Safe Impulse работает на ранней стадии столкновения, прежде чем результирующее замедление начнет увеличиваться, передние пассажиры отталкиваются от направления удара и глубже садятся на свои сиденья ремнями безопасности. К тому времени, когда авария переходит в фазу пика нагрузки, дополнительное расстояние, на которое они отводятся, может быть использовано при контролируемом рассеивании энергии. Предварительное ускорение и ограничение силы позволяют временно изолировать пассажиров от последствий аварии, значительно снижая риск и тяжесть травм при лобовом столкновении. [36]
На Outlander доступна система предотвращения лобового столкновения (FCM), адаптивный круиз-контроль (ACC) и система предупреждения о выезде с полосы движения (LDW) от Mitsubishi
. Система
СистемаForward Collision Mitigation предназначена для предотвращения или снижения скорости столкновения при определенных лобовых столкновениях.
Адаптивный круиз-контроль — это не система предотвращения столкновений или автоматическая система вождения.
Система предупреждения о выезде с полосы движения предназначена для считывания указателей полосы движения при определенных условиях.
Nissan
Бренд Nissan Infiniti предлагает как лазерные, так и радарные системы.
Brake Assist с предварительным просмотром: функция предварительного просмотра прогнозирует необходимость применения экстренного торможения и предварительного повышения давления в тормозной системе, чтобы улучшить реакцию тормозов.
Intelligent Brake Assist (IBA) с передним экстренным торможением (FEB) (на QX80) использует радар для отслеживания скорости приближения к движущемуся впереди автомобилю, помогая обнаружить неминуемое столкновение. Он обеспечивает двухэтапное предупреждение, чтобы предупредить водителя, и, если водитель не предпринимает никаких действий, система автоматически включает тормоза, чтобы снизить скорость столкновения и удар.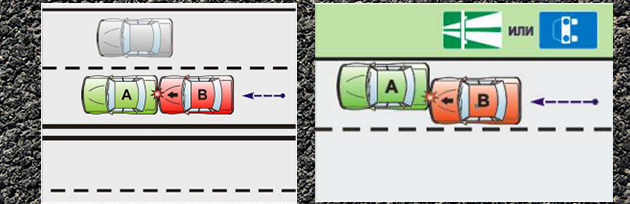
предупреждает водителя о рисках, которые могут быть скрыты от обзора водителя. Он определяет относительную скорость и расстояние транспортного средства, идущего непосредственно впереди, а также транспортного средства, движущегося впереди предыдущего.
Аварийное торможение вперед: когда система определяет, что необходимо замедление, она предупреждает водителя с помощью экрана и звука, затем генерирует силу, которая толкает педаль акселератора вверх, и плавно применяет частичное торможение, чтобы помочь водителю замедлить автомобиль. .Когда система определяет вероятность столкновения, она автоматически применяет более жесткое торможение, чтобы избежать столкновения.
Датчики адаптивного круиз-контроля предоставляют данные для предаварийных системПежо
2014: Peugeot представила активную систему экстренного торможения на Peugeot 308
2014 года Рено2014: Renault представила радар активного экстренного торможения на Renault Espace 2015 года [37]
Шкода
Skoda представила четыре новых системы безопасности в 2013 году, наряду с другими моделями автомобилей группы VW. В число систем входят Multi Collision Brake, [38] Crew Protect Assist, Lane Assistant и Front Assistant. Первой моделью Skoda с этими новыми системами была Skoda Citigo в июне 2012 года вместе с VW up! и Seat Mii, новая Skoda Octavia (2013 г.).
В число систем входят Multi Collision Brake, [38] Crew Protect Assist, Lane Assistant и Front Assistant. Первой моделью Skoda с этими новыми системами была Skoda Citigo в июне 2012 года вместе с VW up! и Seat Mii, новая Skoda Octavia (2013 г.).
Субару
В 2008 году Subaru представила систему EyeSight японским водителям седана, универсала и Outback Legacy, в которой, в отличие от систем на основе радаров, используются две стереокамеры с ПЗС-матрицей, установленные на крыше рядом с зеркалом заднего вида.Эта система также предлагает функции предупреждения о выезде с полосы движения и адаптивного круиза. [39] Начиная с 2014 модельного года, она является опцией для Legacy, Forester или Impreza и только для автомобилей с автоматической коробкой передач или трансмиссией CVT. В 2014 году Subaru обновила систему, используя камеры, которые могут определять цвет (стоп-сигналы) и уменьшив объем системы. [40]
тесла
Tesla Model S имеет функцию, известную как система предотвращения столкновений, которая автоматически включает тормоза, чтобы уменьшить влияние лобового столкновения. Автоматическое экстренное торможение прекращает применение тормозов, когда водитель нажимает педаль акселератора, педаль тормоза или резко поворачивает рулевое колесо. [41]
Автоматическое экстренное торможение прекращает применение тормозов, когда водитель нажимает педаль акселератора, педаль тормоза или резко поворачивает рулевое колесо. [41]
Тойота
Схема PCS LS 600h 2008 года с радаром (синий) и стереокамерой (красный)Система предупреждения столкновений (PCS) Toyota была одной из первых серийных систем предупреждения о лобовых столкновениях. Система на основе радара, в которой используется обращенный вперед радар миллиметрового диапазона. Когда система определяет, что лобовое столкновение неизбежно, она делает упреждающий сигнал. затягивает ремни безопасности, устраняя провисание, и предварительно заряжает тормоза с помощью системы экстренного торможения, чтобы мгновенно обеспечить водителю максимальную тормозную мощность, когда водитель нажимает на педаль тормоза.
2003 Февраль: Toyota представила PCS на модернизированном внутреннем рынке Японии. Harrier
., 2003, август: добавлена автоматическая система частичного предаварийного торможения для Celsior. [42]
[42]
2003 Сентябрь: PCS впервые появилась в Северной Америке на Lexus LS 430, став первой системой предупреждения о столкновении с радаром, предлагаемой в США. [43]
2004: В июле 2004 года система Crown Majesta Radar PCS добавила одну цифровую камеру для повышения точности прогнозов столкновений, предупреждений и уровней контроля. [44] [45] [46]
2006: Система предупреждения столкновений с первой системой мониторинга водителя, представленной в марте 2006 года на Lexus GS 450h [44] с использованием камеры CCD на рулевой колонке.Эта система следит за лицом водителя, чтобы определить, куда водитель смотрит. Если голова водителя отворачивается от дороги и обнаруживается фронтальное препятствие, система предупреждает водителя с помощью зуммера и, при необходимости, предварительно заряжает тормоза и затягивает ремни безопасности.
2006: Lexus LS был оснащен усовершенствованной версией PCS. Усовершенствованная система предотвращения столкновений (APCS) добавила двухлинзовую стереокамеру, расположенную на лобовом стекле, и более чувствительный радар, впервые обнаруживающий более мелкие «мягкие» объекты, такие как животные и пешеходы.Расположенный в фарах проектор ближнего инфракрасного диапазона позволяет системе работать в ночное время. Благодаря адаптивной регулируемой подвеске (AVS) и рулевому управлению с электроусилителем система может изменять жесткость амортизатора, передаточное число рулевого механизма и усилитель крутящего момента, чтобы помочь водителю избежать маневрирования. Система предупреждения о выезде с полосы движения будет автоматически регулировать рулевое управление, чтобы гарантировать, что транспортное средство сохраняет свою полосу движения в случае, если водитель не среагирует. Система мониторинга водителя была внедрена на Lexus LS.Система предотвращения столкновения сзади включает в себя обращенный назад радар миллиметрового диапазона, установленный в заднем бампере.
Усовершенствованная система предотвращения столкновений (APCS) добавила двухлинзовую стереокамеру, расположенную на лобовом стекле, и более чувствительный радар, впервые обнаруживающий более мелкие «мягкие» объекты, такие как животные и пешеходы.Расположенный в фарах проектор ближнего инфракрасного диапазона позволяет системе работать в ночное время. Благодаря адаптивной регулируемой подвеске (AVS) и рулевому управлению с электроусилителем система может изменять жесткость амортизатора, передаточное число рулевого механизма и усилитель крутящего момента, чтобы помочь водителю избежать маневрирования. Система предупреждения о выезде с полосы движения будет автоматически регулировать рулевое управление, чтобы гарантировать, что транспортное средство сохраняет свою полосу движения в случае, если водитель не среагирует. Система мониторинга водителя была внедрена на Lexus LS.Система предотвращения столкновения сзади включает в себя обращенный назад радар миллиметрового диапазона, установленный в заднем бампере. [47] Эта система регулирует активные подголовники, перемещая их вверх и вперед, чтобы снизить риск хлыстовых травм при обнаружении неизбежного столкновения сзади. [48]
[47] Эта система регулирует активные подголовники, перемещая их вверх и вперед, чтобы снизить риск хлыстовых травм при обнаружении неизбежного столкновения сзади. [48]
2008 Обновленная система мониторинга водителя добавлена на Crown для определения, правильно ли открыты глаза водителя. [49] Он контролирует глаза водителя, чтобы определить уровень его бодрствования.Эта система предназначена для работы даже в темных очках и в ночное время.
2008 PCS с функцией помощи при торможении, связанной с GPS-навигацией, на Crown. Система, которая предназначена для определения того, опаздывает ли водитель на замедление при приближающемся знаке остановки, затем подает сигнал тревоги и также может предварительно заряжать тормоза, чтобы обеспечить оптимальное тормозное усилие, если это будет сочтено необходимым. Эта система работает в некоторых японских городах и требует наличия специальной дорожной разметки для Японии, которая определяется камерой.
2009 на модернизированной Crown, [50] Toyota снова усовершенствовала систему PCS, добавив передний боковой радар миллиметрового диапазона для обнаружения возможных боковых столкновений, прежде всего, на перекрестках или при пересечении другим автомобилем центральной линии. В последней версии заднее сиденье откидывается вверх, что обеспечивает более удобное положение пассажира при столкновении с ним, если он обнаруживает лобовой или задний удар. [51]
2012: Более высокая скорость A-PCS на обновленном Lexus LS: обеспечивает замедление до 37 миль в час по сравнению с системой текущего поколения на 25 миль в час.Эта более высокоскоростная A-PCS использует те же технологии, что и текущая A-PCS. Эта система увеличивает тормозное усилие вдвое по сравнению с обычным водителем. (Недоступно на рынках США из-за нормативных требований.)
2013: Система предотвращения столкновений с системой помощи при рулевом управлении для предотвращения пешеходов и ассистентом обхода рулевого управления [52] может помочь предотвратить столкновения в тех случаях, когда одного автоматического торможения недостаточно, например, когда транспортное средство движется слишком быстро или пешеход внезапно шагает. на путь транспортного средства.Бортовой датчик обнаруживает пешеходов и выдает визуальное оповещение на приборной панели сразу перед водителем, если система определяет, что существует риск столкновения. Если вероятность столкновения увеличивается, система подает звуковой и визуальный сигнал тревоги, чтобы побудить водителя к уклонению, и активируются увеличенное тормозное усилие перед столкновением и функции автоматического торможения. Если система определяет, что столкновения нельзя избежать одним лишь торможением и есть достаточно места для предотвращения, активируется система помощи при рулении, чтобы увести автомобиль подальше от пешехода. [53]
на путь транспортного средства.Бортовой датчик обнаруживает пешеходов и выдает визуальное оповещение на приборной панели сразу перед водителем, если система определяет, что существует риск столкновения. Если вероятность столкновения увеличивается, система подает звуковой и визуальный сигнал тревоги, чтобы побудить водителя к уклонению, и активируются увеличенное тормозное усилие перед столкновением и функции автоматического торможения. Если система определяет, что столкновения нельзя избежать одним лишь торможением и есть достаточно места для предотвращения, активируется система помощи при рулении, чтобы увести автомобиль подальше от пешехода. [53]
Volkswagen
2010: Система «Front Assist» на Volkswagen Touareg 2011 года может тормозить до полной остановки в случае аварии и в качестве меры предосторожности натягивать ремни безопасности. [54]
2012: В 2012 году Volkswagen Golf Mk7 представил свою «проактивную защиту пассажиров», которая закроет окна и втянет ремни безопасности, чтобы устранить излишнее провисание в случае обнаружения вероятности лобового столкновения.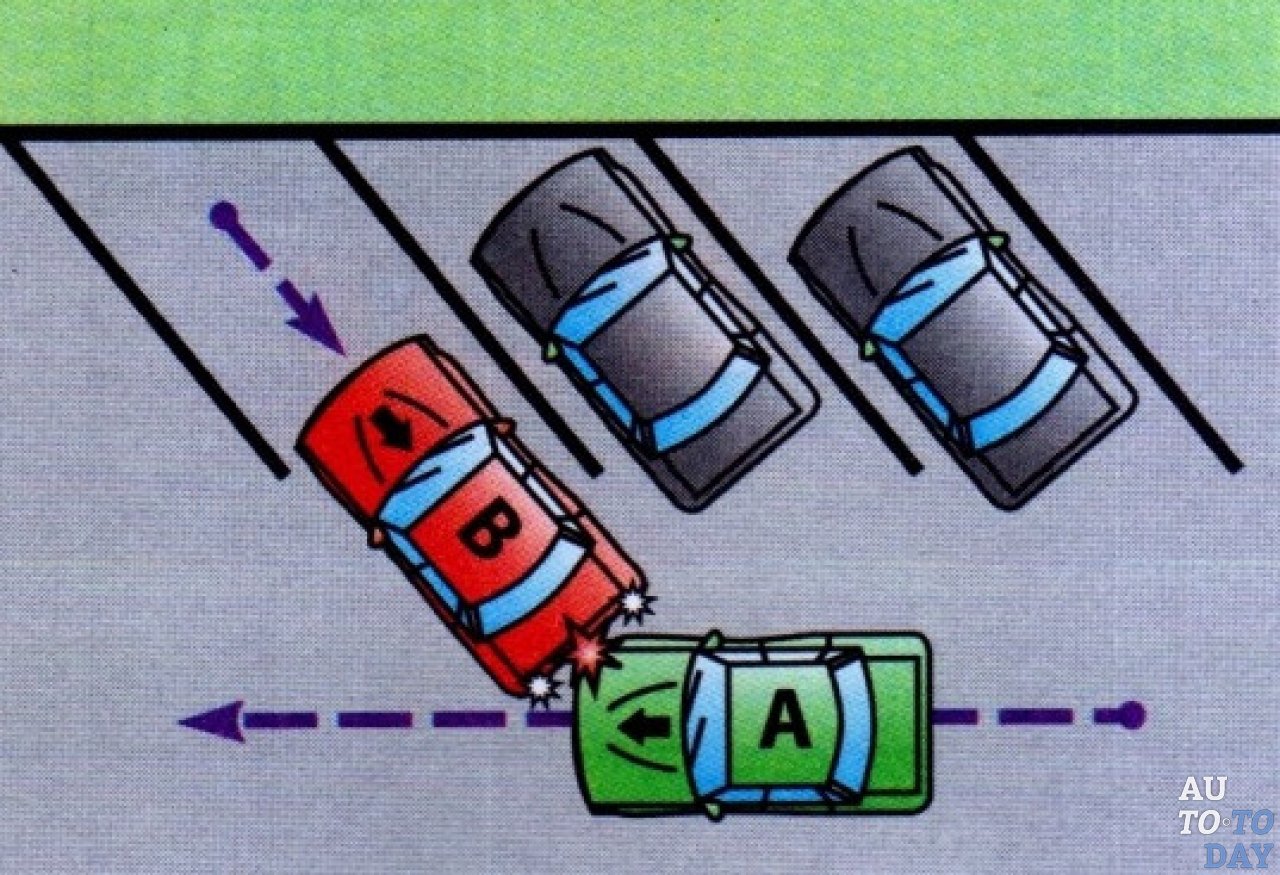 Тормозная система с несколькими столкновениями (Automatic Post-Collision Braking System) для автоматического торможения автомобиля после аварии, чтобы избежать второго столкновения.Система экстренного торможения в городе автоматически активирует тормоза на низких скоростях в городских условиях.
Тормозная система с несколькими столкновениями (Automatic Post-Collision Braking System) для автоматического торможения автомобиля после аварии, чтобы избежать второго столкновения.Система экстренного торможения в городе автоматически активирует тормоза на низких скоростях в городских условиях.
2014: Volkswagen Passat B8 вводит распознавание пешеходов как часть системы. Он использует сочетание датчиков между камерой и датчиком радара. Есть «экстренная помощь» на случай, если водитель не реагирует, автомобиль берет на себя управление тормозами и рулевым управлением до полной остановки.
Вольво Volvo City Safety с несколькими камерами 2006: Система Volvo «Предупреждение о столкновении с автоматическим торможением», разработанная в сотрудничестве с Mobileye, была представлена на S80 2007 года.Эта система питается от слияния радаров и датчиков камеры и выдает предупреждение на проекционном дисплее, который визуально напоминает стоп-сигналы. Если водитель не реагирует, система предварительно заряжает тормоза и увеличивает чувствительность ассистента торможения, чтобы максимизировать эффективность торможения водителя. Более поздние версии будут автоматически включать тормоза, чтобы минимизировать удары пешеходов. В некоторых моделях Volvo автоматическое торможение можно отключить вручную. V40 также имел первую подушку безопасности для пешеходов, когда она была представлена в 2012 году.
Более поздние версии будут автоматически включать тормоза, чтобы минимизировать удары пешеходов. В некоторых моделях Volvo автоматическое торможение можно отключить вручную. V40 также имел первую подушку безопасности для пешеходов, когда она была представлена в 2012 году.
2013: Volvo представила первую систему обнаружения велосипедистов. Все автомобили Volvo теперь в стандартной комплектации оснащены лидарным лазерным датчиком, который контролирует переднюю часть проезжей части, и при обнаружении потенциального столкновения ремни безопасности втягиваются, чтобы уменьшить чрезмерное провисание. Volvo теперь включает это устройство безопасности в качестве опции в грузовики серии FH. [55]
2015: «IntelliSafe» с автоматическим торможением на перекрестке. Volvo XC90 — первая технология с автоматическим торможением, если водитель поворачивает перед встречным автомобилем.Это распространенный сценарий на оживленных городских перекрестках, а также на автомагистралях, где ограничения скорости выше.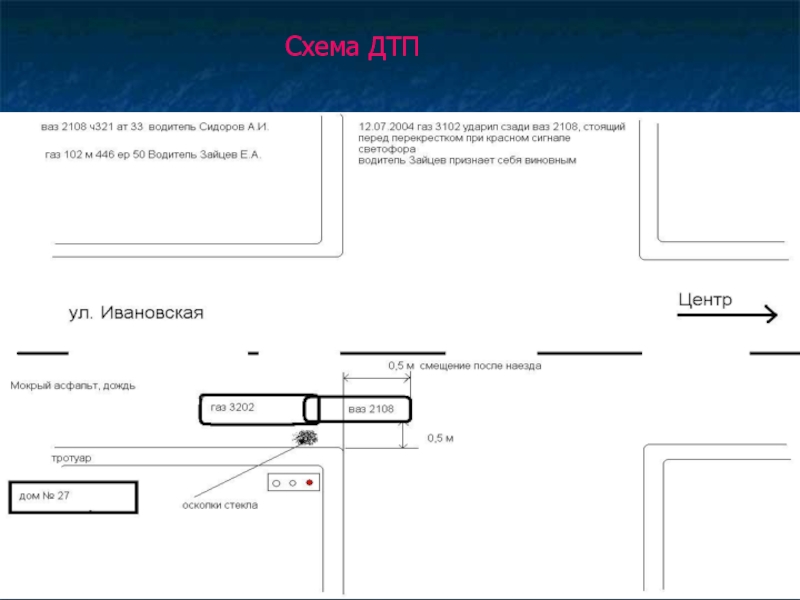
Список автомобилей с доступными функциями предотвращения столкновений
- Acura RL, MDX, ZDX
- Audi A8, A7 с 2010 г., A6 с 2011 г., Audi A3 с 2013 г., Audi Q7 с 2015 г.
- Dodge Durango с 2011 года
- Honda Accord, вдохновляет с 2003 года, Honda CR-V
- Ford Edge, Focus Fiesta, Taurus, Flex, Kuga
- Buick Enclave, 2012 GMC Terrain, GMC Acadia, 2013 Cadillac ATS, 2013 Cadillac XTS, Chevrolet Impala десятого поколения, Chevrolet Traverse, Chevrolet Equinox
- Инфинити FX, EX, Q50, QX56, QX60
- Lexus LS с 2003 года, GS (2005), IS (2005), RX (2008)
- Mazda 3, 6, CX-5, CX-9
- Mercedes-Benz B-класса, CLA-класса, E-класса, S-класса, M-класса
- Mitsubishi, Outlander,
- Nissan X-Trail Tekna, 2015 [56]
- Peugeot 308, 2014
- Skoda Octavia, 2013, третье поколение ->
- SsangYong Rexton
- Subaru Legacy, Outback, Forester, Impreza Subaru XV Crosstrek с Subaru EyeSight
- Suzuki Kizashi, PRECRS, только JDM
- Tesla Model S (2015 модельного года)
- Toyota Avensis третьего поколения
- Тойота Приус
- Volkswagen Up !, SEAT Mii, Skoda Citigo
- Volvo V40, S60, V60, XC60, V70, XC70, S80, XC90
См. Также
 Также
Также Список литературы
- ↑ Kanarachos, Stratis (2009).«Новый метод расчета оптимального маневрирования транспортных средств при уклонении от препятствий». Международный журнал автомобильных автономных систем . 7 (1): 73–95. DOI: 10.1504 / IJVAS.2009.027968. Проверено 29 июля 2015 г.
- ↑ «Технология систем предупреждения о столкновениях», представленная Олни Р.Д. и др. На Всемирном конгрессе интеллектуальных транспортных систем в Иокогаме, Япония, в ноябре 1995 года.
- ↑ Журнал Car & Driver «The Mensa-Mobile», август 1996 года, страницы 144-145
- ↑ Wired Magazine «Информационная супермагистраль» (Это не метафора.) «, Джо Визенфельдер, выпуск 4.02 — февраль 1996 г.
- ↑ WARDSAUTO «Машина мечты Delco» 1 мая 1996 г. Кинан, Тим
- ↑ «Заключительный отчет по проекту требований к предупреждению о прямом столкновении — Задача 1» (PDF). Национальная администрация безопасности дорожного движения. Январь 2003 г. Получено 29 июля 2015 г.
- ↑ «Письменный вопрос — Дорожные столкновения сзади в Европейском Союзе — E-011477/2011». europa.eu . Проверено 25 января 2015 г.
- ↑ «Ответ на письменный вопрос — Дорожные столкновения сзади в Европейском Союзе — E-011477/2011». europa.eu . Проверено 25 января 2015 г.
- ↑ http://ec.europa.eu/enterprise/sectors/automotive/files/safety/sec_2008_1908_en.pdf
- ↑ «Функции предотвращения аварии сокращают страховые выплаты». iihs.org . Проверено 4 апреля 2015 г.
- ↑ «Высокая безопасность в новом Audi A8» (пресс-релиз). Bosch Media Services. 27 апреля 2010 г. Получено 29 июля 2015 г.
- ↑ «Новый Audi A8» (PDF) (пресс-релиз).Проверено 17 февраля 2010 г.
- ↑ «Новый Audi Q7 — спортивность, эффективность, премиальный комфорт» (пресс-релиз). Ауди Медиа Центр. 12 декабря 2014 г. Получено 20 июля 2015 г.
- ↑ «Виртуальные бамперы Cadillac могут помочь избежать сбоев». media.gm.com (пресс-релиз).Проверено 25 января 2015 г.
- ↑ Chrysler Group LLC (2 июня 2010 г.). «Совершенно новый Jeep Grand Cherokee 2011 года получил« лучший выбор безопасности »благодаря страховке . ..» prnewswire.com (пресс-релиз). Проверено 25 января 2015 г.
- ↑ 16,0 16,1 «Система City Brake Control получила награду Euro NCAP Advanced». FGA EMEA Press site (Пресс-релиз). 26 июня 2013 г. Получено 30 июня 2014 г.
- ↑ «Euro NCAP Advanced: FIAT City Brake Control». Официальный сайт Euro NCAP . Получено 30 июня 2014 г.
- ↑ [1] [ мертвое звено ]
- ↑ «Новая Toyota, Ford Systems может избегать пешеходов». thedetroitbureau.com . Проверено 25 января 2015 г.
- ↑ «Дебют новых камер для оповещения о столкновениях на местности GMC». media.gm.com (пресс-релиз). Проверено 25 января 2015 г.
- ↑ Chevrolet News — США — Impala
- ↑ 2016 Малибу
- ↑ «Honda объявляет о полном изменении модели для Inspire» (пресс-релиз).Хонда. 2003-06-18. Проверено 19 января 2015.
- ↑ «Honda Worldwide». honda.com (пресс-релиз). Проверено 25 января 2015 г.
- ↑ 25,0 25,1 25,2 «Honda Worldwide — Мировые новости — выпуски новостей — 20 мая 2003 г.». honda.com (пресс-релиз).Проверено 25 января 2015 г.
- ↑ [2] [ мертвое звено ]
- ↑ Hyundai Genesis | Особенности | Техника безопасности | Новый Hyundai Genesis 2015 года
- ↑ «MAZDA: Mazda представит передовые технологии безопасности с поддержкой умных городских тормозов в новом кроссовере Mazda CX-5». mazda.com (пресс-релиз). Проверено 25 января 2015 г.
- ↑ http://www2.mazda.com/en/technology/safety/precrash_safety/sbs.html
- ↑ [3] [ мертвое звено ]
- ↑ 31,0 31,1 [4] [ мертвое звено ] Инновации как традиция
- ↑ Daimler Media: инновации как традиция [ мертвая ссылка ]
- ↑ http://www-nrd.nhtsa.dot.gov/pdf/nrd-01/esv/esv20/07-0103-O.pdf
- ↑ «Воздействие: настоящие драйверы.Life Changing Stories — Mercedes-Benz «. Impact . Проверено 25 января 2015 г.
- ↑ «Особенность Mercedes-Benz TecDay: ПРЕДВАРИТЕЛЬНАЯ И ПРЕДВАРИТЕЛЬНАЯ БЕЗОПАСНОСТЬ тормозов». emercedesbenz.com (пресс-релиз). Проверено 25 января 2015 г.
 css»>
css»> - ↑ 36,0 36,1 36,2 36.3 «Расширенная ПРЕДВАРИТЕЛЬНАЯ ЗАЩИТА: Профилактика лучше лечения». daimler.com (пресс-релиз). May 2013. Получено 25 января 2015 г..
- ↑ «ADAS: ряд технологий, способствующих безопасности и облегчению вождения». renault.com (пресс-релиз). Проверено 25 января 2015 г.
- ↑ «Награда Euro NCAP 2013 — Тормоз Skoda Multi-Collision».Получено
 Национальная администрация безопасности дорожного движения. Январь 2003 г. Получено 29 июля 2015 г.
Национальная администрация безопасности дорожного движения. Январь 2003 г. Получено 29 июля 2015 г.  Bosch Media Services. 27 апреля 2010 г. Получено 29 июля 2015 г.
Bosch Media Services. 27 апреля 2010 г. Получено 29 июля 2015 г. 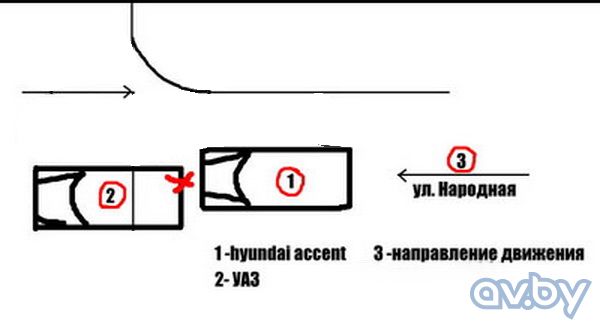 ..» prnewswire.com (пресс-релиз). Проверено 25 января 2015 г.
..» prnewswire.com (пресс-релиз). Проверено 25 января 2015 г.  media.gm.com (пресс-релиз). Проверено 25 января 2015 г.
media.gm.com (пресс-релиз). Проверено 25 января 2015 г.  mazda.com (пресс-релиз). Проверено 25 января 2015 г.
mazda.com (пресс-релиз). Проверено 25 января 2015 г. | Дата происшествия | Дата публикации | Несчастный случай или происшествие | Название и тип судна | Тип аварии | Место происшествия | Отчет (включая видео) |
|---|---|---|---|---|---|---|
2019. 09.02 09.02 | 2020.07.30 | Несчастный случай | GLOVIS COMPANION, Автовоз / HIGASHIDA MARU, Рыболовное судно | Столкновение | Маршрут движения Акаси Кайкё Около 019 ° истинного пеленга, 1.3 морских мили (м) от Эсаки Маяк (примерно 34 ° 37,6’N, 135 ° 00,0’E) | |
| 2019.03.11 | 2020.11.26 | Несчастный случай | EOS, Нефтяной танкер и танкер-химовоз / AISHO No. 8, Грузовое судно | Столкновение | North Passage, порт Нагоя, префектура Айти Около 095 ° истинного пеленга, 760 м от сигнальной станции Киндзё, Центр службы движения судов Нагоя-Ко | |
| 2019.01.17 | 2020.06.25 | Несчастный случай | ISHIZUCHI, Сухогруз | Смерть рабочего | Набережная, примыкающая к Sumitomo Chemical Co. , Ltd., порт Ниихама, город Ниихама, префектура Эхимэ , Ltd., порт Ниихама, город Ниихама, префектура Эхимэ Окрестности T.B’g 059 ° / 668 м от восточного мола порта Ниихама Маяк | |
| 2019.01.06 | 2019.07.25 | Несчастный случай | HARRIER, Контейнеровоз | Погиб грузчика | Причал Т1 пристани Набета, город Ятоми, префектура Айти На истинном пеленге примерно 283 ° и на расстоянии 1400 метров от западного прохода порта Нагоя №8 световых лучей | |
| 2018.10.22 | 2019.10.31 | Несчастный случай | ЭРНА ОЛДЕНДОРФФ, Сухогруз | Столкновение (мост) | Мост Осима через Обатакэ Сето, префектура Ямагути Около 058 °, 875 м от маяка Оисо | |
| 2018.10.01 | 2019.12.19 | Несчастный случай | МАРИНА, Сухогруз | Столкновение (морская дамба) | Участок Кавасаки, порт Кейхин, префектура Канагава (дамба на заводе JFE Steel в Огисиме) Около 355 ° истинного пеленга, 550 м от причального маяка Тоден-Огисима для СПГ | |
2018. 09.29 09.29 | 2020.01.30 | Несчастный случай | SM3, Сухогруз / KOUTOKU MARU, Нефтяной танкер | Столкновение | Район Вакамацу порта Канмон, проход Канмон Около 086 ° истинного азимута, 1070 м от маяка Вакамацу Дукайванкоу | |
| 2018.09.18 | 2019.02.28 | Несчастный случай | ЭРИК, Грузовое судно | Погиб члена экипажа | Пристань Мицубиси Наосима, Наосима-тё, префектура Кагава На истинном пеленге примерно 236 ° и на расстоянии 460 метров от маяка Сануки Терасима | |
| 2018.17.08 | 2020.08.27 | Несчастный случай | OOCL NAGOYA, Контейнеровоз | Столкновение | Причал № 26 пристани Касумигаура-Минами, порт Йоккаити, город Йоккаичи, префектура Мие | |
2018. 05.04 05.04 | 2019.06.27 | Несчастный случай | NYK VENUS, Контейнеровоз / SITC OSAKA, Контейнеровоз | Столкновение | Порт Ханшин, район Кобе, к югу от побережья Около 218 ° истинного пеленга, 350 м от восточного водного пути острова Кобе Рокко в районе центрального плавучего светящегося буя | |
| 2018.04.08 | 2019.03.28 | Несчастный случай | GOLDEN SUNNY HANA, Танкер-химовоз | Взрыв грузового маслобака | к юго-востоку от порта Кунисаки, город Кунисаки, префектура Оита. Около 111 ° истинного пеленга, 5,0 морских миль от маяка Южного волнолома порта Кунисаки. | |
| 2018.04.02 | 2019.02.28 | Несчастный случай | NIPPON MARU, Учебный корабль | Погибший курсант | Порт Кейхин, Токийский район 3, No. 10-1 Многоцелевой терминал M-P Около 294 ° истинного пеленга, 1,2 морских мили от маяка Tokyo Mokuzai Anchorage Breakwater West Lighthouse 10-1 Многоцелевой терминал M-P Около 294 ° истинного пеленга, 1,2 морских мили от маяка Tokyo Mokuzai Anchorage Breakwater West Lighthouse | |
| 2017.10.23 | 2018.12.20 | Несчастный случай | REAL, Сухогруз | Заземление | Порт Фусики-Тояма, префектура Тояма Около 241 ° истинного пеленга, 220 м от маяка Восточный волнорез | |
| 2017.08.07 | 2018.08.30 | Несчастный случай | ASIAN BEAUTY, Сухогруз / ZEUS, Балкер для сжиженного газа | Столкновение | За пределами порта Такума, город Митойо, префектура Кагава | |
| 2017.06.17 | 2019.08.29 | Несчастный случай | ACX CRYSTAL, Контейнеровоз / USS FITZGERALD, Военный ракетный эсминец | Столкновение | Юго-восток от Ирузаки, город Минамиидзу, префектура Сидзуока, приблизительно 113 ° истинного положения, 12.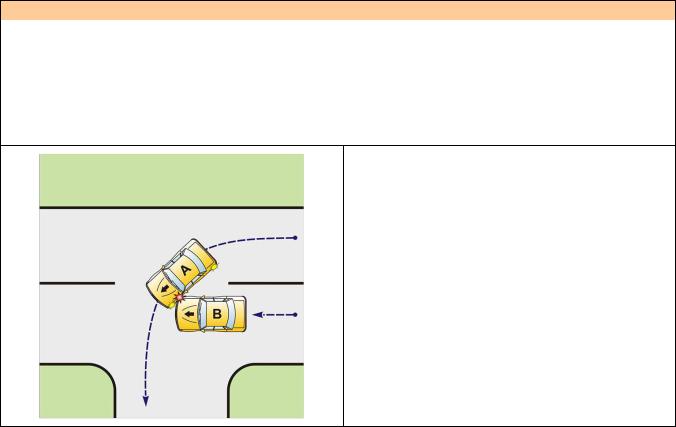 3 морских мили от маяка Ирузаки 3 морских мили от маяка Ирузаки | |
| 2017.04.24 | 2018.10.25 | Несчастный случай | TAI YUAN, Сухогруз | Пожар | Причал № 16, пристань Хакодзаки, порт Хаката, город Фукуока, префектура Фукуока | |
| 2017.02.11 | 2018.10.25 | Несчастный случай | САГАН, Нефтяной танкер | Заземление | На юго-западном побережье острова Суваноседзима, Тосима-мура, Кагосима | |
| 2017.01.30 | 2017.11.30 | Несчастный случай | SWIFTNES, Грузовое судно / FUJI MARU, Рабочая лодка | Опрокидывание | Порт Томакомай, город Томакомай, Хоккайдо | |
2017.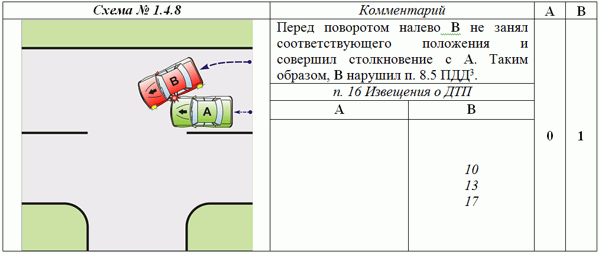 01.19 01.19 | 2017.12.21 | Несчастный случай | MANHATTAN BRIDGE, Контейнеровоз | Взрыв вспомогательного котла | Порт Феликстоу, Великобритания | |
| 2017.01.11 | 2018.01.25 | Инцидент | TONG DA, Сухогруз | Листинг | К северу от острова Осима, город Мунаката, префектура Фукуока | |
| 2016.10.30 | 28.09.2017 | Несчастный случай | BBC ASIA, Сухогруз | Смерть и травмы рабочих | На восточной набережной Шинко Т-Уорф, секция Кобе, порт Ханшин | |
| 2016.09.09 | 2017.10.26 | Несчастный случай | EIWA MARU 3, Танкер-химовоз | Взрыв | К югу от города Гобо, префектура Вакаяма | |
2016. 08.07 08.07 | 2018.02.22 | Несчастный случай | EASTERN PHOENIX, Танкер-химовоз / KEIHIN MARU № 8, Нефтяной танкер | Столкновение | К юго-востоку от острова Хигаси-Огисима, город Кавасаки, префектура Канагава | |
| 2016.06.07 | 2018.02.22 | Несчастный случай | ESTELLE MAERSK, Контейнеровоз / JJ SKY, Контейнеровоз | Столкновение | Пассаж Кобе Тюо, секция Кобе, порт Хансин | |
| 2016.05.21 | 2017.08.31 | Несчастный случай | FINE CHEMI, Танкер-химовоз | Пропавший член экипажа | К югу от мыса Асизури, город Тосашимидзу, префектура Коти | |
| 2016.05,16 | 2017.08.31 | Несчастный случай | HUNAN, Сухогруз | Пропавший член экипажа | К западу от Хэйгун-тоу, префектура Ямагути | |
2016. 04.22 04.22 | 28.09.2017 | Несчастный случай | BUCCOO REEF, Танкер-химовоз | Погиб члена экипажа | В порту Бордо, Французская Республика | |
| 2016.04.07 | 2017.08.31 | Несчастный случай | MOL DEVOTION, Контейнеровоз | Травма рабочего | At Honmoku Pier D5 Wharf, Йокогама, префектура Канагава | |
| 2016.02.19 | 2017.03.30 | Несчастный случай | SINOKOR INCHEON, Контейнеровоз / TOSHIMARU, Рыболовное судно | Столкновение | К востоку от Химэ-сима, деревня Химэшима, преф. | |
| 2016.01.10 | 28.09.2017 | Несчастный случай | CITY, Сухогруз | Заземление | Рядом с портом Саката, город Саката, префектура Ямагата | |
2016.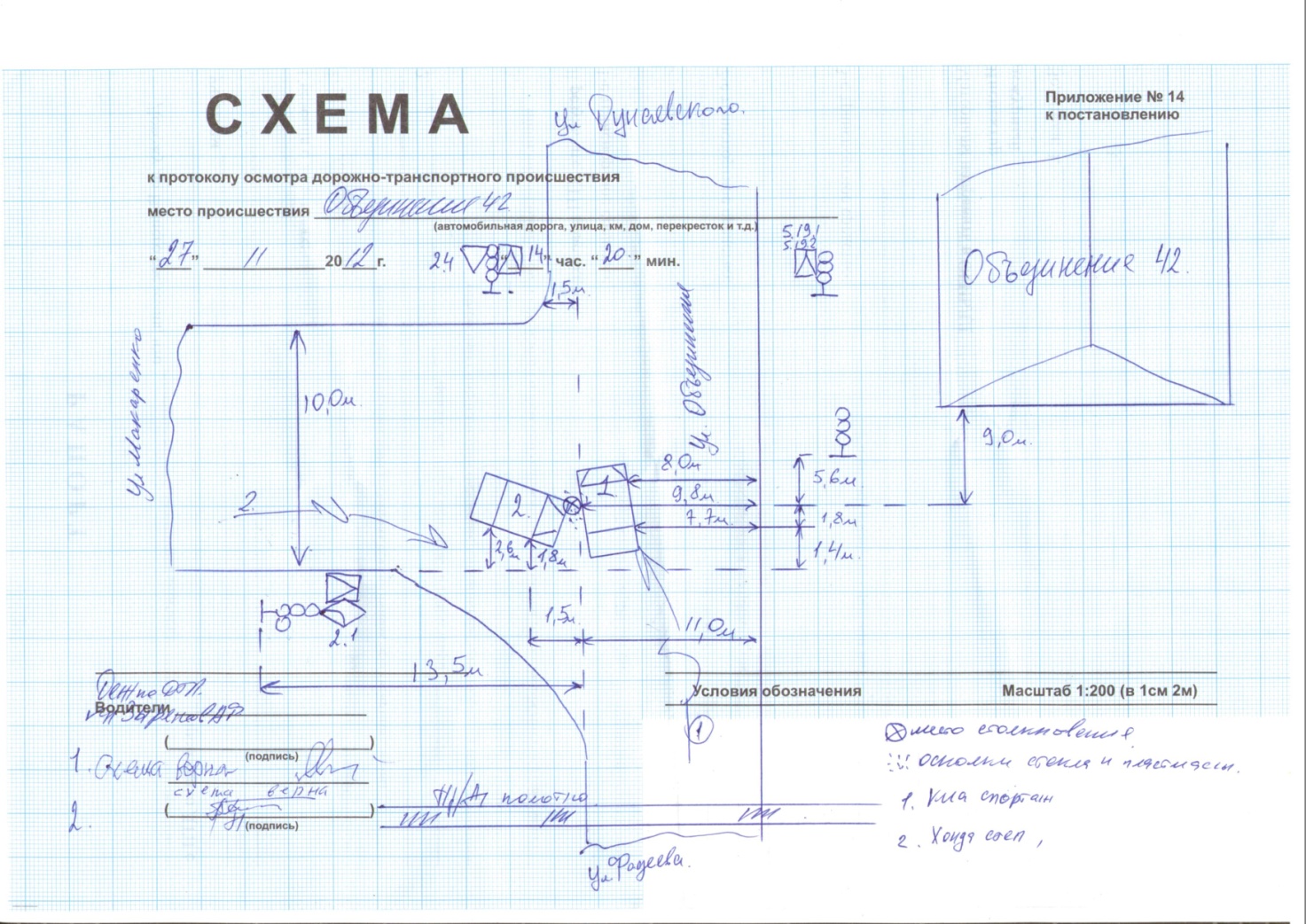 01.08 01.08 | 27.07.2017 | Несчастный случай | BEETLE, Пассажирское судно / морская жизнь | Столкновение | к северо-западу от Ками Сима, город Цусима, префектура Нагасаки | |
| 2015.11.02 | 2017.06.29 | Несчастный случай | BALTIA, Сухогруз / RYOHOMARU № 8, Рыболовное судно | Столкновение | На западе-северо-западе от мыса Кодомари, город Накадомари, префектура Аомори | |
| 2015.10.19 | 2016.10.27 | Несчастный случай | TRITON SWAN, Сухогруз | со смертельным исходом | Зерновая пристань Кобе Секция 2, порт Хансин | |
| 2015.10,17 | 2017.02.23 | Несчастный случай | SULFUR GARLAND, Танкер-химовоз /
WAKO MARU No. 2, Нефтяной танкер 2, Нефтяной танкер | Столкновение | К востоку от острова Муцурешима, город Симоносеки, прив. Ямагути. | |
| 2015.10.14 | 2016.10.27 | Несчастный случай | ASIAN INFINITY, Сухогруз | со смертельным исходом | Причал 5 порта Сома, Фукусима прив. | |
| 2015.06.06 | 2017.01.26 | Несчастный случай | SHIN HEIRYU, Сухогруз | Контакт (световой буй) | В порту Сингапура, Республика Сингапур | |
| 2014.12.26 |
схема аварии — перевод — англо-французский словарь
en • охватывают более 40 аварийных ситуаций, используя диаграммы для иллюстрации конкретных сценариев;
Giga-fren fr Mais encore plus dangereux que le Kraken luimême en Описание систем вентиляции, фильтрации и сброса в нормальных условиях и в случае аварии, включая технологические схемы.
en Описание систем вентиляции, разложения, фильтрации и сброса в нормальных условиях и в случае аварии, включая технологические схемы
EurLex- 2 fr Il est vraiment navranten Описание систем вентиляции, разложения, фильтрации и сброса в нормальных условиях и в случае аварии, включая технологические схемы
oj4 fr À la LIP, les ASF utilisent le SSMAEC для предоставления информации о главных объектах и функциях использования услуг для импорта импортных товаров.ru Описание систем вентиляции, гниения, фильтрации и сброса в нормальных условиях и в случае аварии, включая технологические схемы
EurLex-2 fr Je serais heureux de pouvoir me рычаг à la Chambre aujourd’hui pour Dire que les libéraux font du bon travail, mais ce n’est tout simplement pas le cas et rien ne montre qu’ils se preoccupent vraiment de ce досьеen Описание систем вентиляции, разложения, фильтрации и сброса при демонтаже, в в нормальных условиях и в случае аварии, включая технологические схемы
EurLex-2 fr Je peux y retourneren Описание систем вентиляции, разложения, фильтрации и сброса во время демонтажа, в нормальных условиях и в случае авария, включая блок-схемы
oj4 fr Je vous pardonne, au nom de mes compatriotesen Фотографии и / или схемы места происшествия;
UN-2 fr Удовлетворительная разработка для уменьшения риска заболеваний сердечно-сосудистой системы, заболеваний сердечно-сосудистой системы, диабета 2-го типа и определенных видов рака.ru Этот результат соответствует подробной статистике ДТП (см. Таблицу и диаграммы выше).
UN-2 fr de saumons du Pacifique (Oncorhynchus nerka, Oncorhynchus gorbuscha, Oncorhynchus keta, Oncorhynchus tschawytscha, Oncorhynchus kisutch, Oncorhynchus masou et Oncorhynchus saumtique rhodurus)ru 2. фотографии и / или схемы места происшествия;
Eurlex2019 от Va doucement!en фотографии и / или схемы места происшествия;
EurLex-2 от Camilla, tu penses qu ‘Ole serait intéressé par cesbricoles?en фотографии и / или схемы места происшествия
oj4 fr ° l’interдикция-использование établissements où les délits onté commis.»ru 2) фотографии и схемы места аварии;
EurLex-2 fr Mais l’Assemblée en a décidé autrement à la majorité.en фотографии и / или схемы места происшествия;
UN-2 fr C ‘est une vieille histoire en Там есть схема аварии, но я не копировал ее, так как она вам все равно не поможет.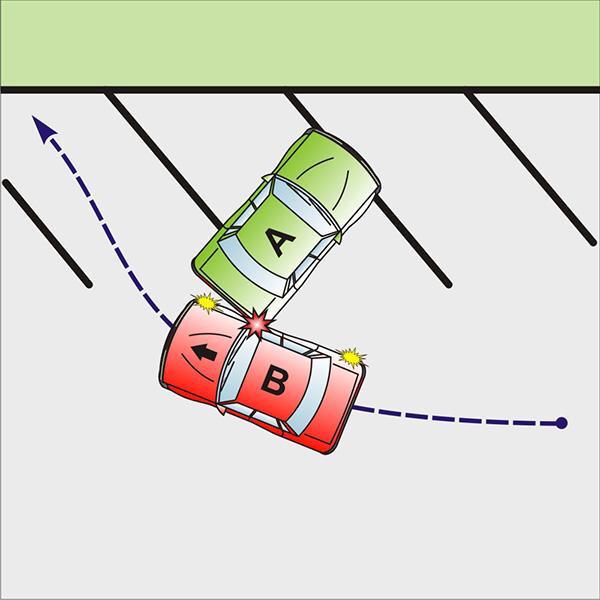
en Технические консультации в отношении аппаратуры для оценки диаграмм, тахографов, регистраторов данных о происшествиях, электронных журналов регистрации, аппаратуры и приборов для тестирования и диагностики
tmClass fr En vertu du paragraphe #. #, Point a), de l ‘ encadrement des aides au secteur car, le bénéficiaire doit prouver d’une manière claire et convaincante, pour démontrer la nécessité d’une régionale, qu’il dispose, pour son projet, d’un site alternatif économiquement viableru , сборка и ремонт оценочной аппаратуры для диаграмм, тахографов, регистраторов данных о дорожно-транспортных происшествиях, электронных журналов, испытательного и диагностического оборудования и инструментов
tmClass fr Il a dit que nos soldats étaient des gens trés professionalnels qui faisaient un travail remarquable et qu ‘ ils croyaient dans la juste cause que défend l’OTAN en ПРИЛОЖЕНИЕ IV Данные об авариях, содержащиеся в отчетах об авариях. включить следующие данные: 1) точное место происшествия; 2) фотографии и схемы места происшествия; 3) дата и час происшествия; 4) информация о дороге, такая как тип участка, тип дороги, тип перекрестка, в т.ч.сигнализация, количество полос движения, разметка, дорожное покрытие, освещение и погодные условия, ограничение скорости, боковые препятствия; 5) тяжесть аварии, в том числе количество погибших, госпитализированных и легко травмированных.
включить следующие данные: 1) точное место происшествия; 2) фотографии и схемы места происшествия; 3) дата и час происшествия; 4) информация о дороге, такая как тип участка, тип дороги, тип перекрестка, в т.ч.сигнализация, количество полос движения, разметка, дорожное покрытие, освещение и погодные условия, ограничение скорости, боковые препятствия; 5) тяжесть аварии, в том числе количество погибших, госпитализированных и легко травмированных.
en Поскольку удаление диаграммы может вызвать серьезную опасность. потеря работы из-за несчастного случая, & umbrello; попросит вас подтвердить операцию удаления перед фактическим удалением диаграммы.После удаления диаграммы и сохранения файла это действие уже невозможно отменить.
потеря работы из-за несчастного случая, & umbrello; попросит вас подтвердить операцию удаления перед фактическим удалением диаграммы.После удаления диаграммы и сохранения файла это действие уже невозможно отменить.
en • Были реализованы технические меры по неразглашению информации, чтобы обеспечить доступ к схемам и схемам расположения компании Garmin International для изучения и извлечения данных, хранящихся в приемниках глобальной системы позиционирования, восстановленных после аварии транспортных средств;
Giga-fren fr Projet d’ordonnance portant assentiment à l’accord de coopération entre l’Etat, la Communauté flamande, la Région flamande, la Communauté française, la Région wallonne, la Communauté germanophone-cap de la Région , la Commission communautaire commune et la Commission communautaure française portant création d’une Commission nationale pour les droits de l’enfant, fait à Bruxelles, le # septembre en Еще один момент, который еще не отражен в диаграммах в приложении, — это включение ссылок на другие базы данных об авариях, которые существуют для каждого вида транспорта, но не относятся к перевозке опасных грузов, например, база данных Европейского железнодорожного агентства (ERA) для железнодорожного транспорта.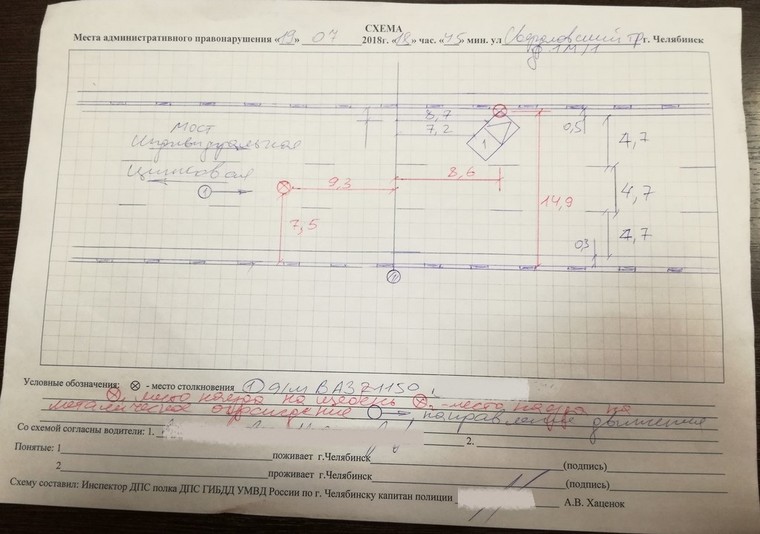
Этика автономных автомобилей, самоуправление и проблема тележки
За последние несколько лет в автомобили было встроено все больше и больше автономных функций. А всего пару месяцев назад Tesla выпустила следующее видео, в котором хвастается своим достижением «полного самоуправления».
В статье Techopedia сообщается, что даже более ранние автомобили Tesla содержали «необходимое оборудование для автономного вождения», хотя активация этой способности зависела от обновления программного обеспечения.В статье также предусматривается разница между тем, как построенные сегодня автономные автомобили будут отличаться от автомобилей будущего.
В настоящее время автомобили Tesla оснащены необходимым оборудованием для автономного вождения, но для полной активации этой функции требуются обновления программного обеспечения. Хотя это позволит полностью автономное вождение, оно также позволит водителю-человеку взять на себя управление, когда ситуация требует вмешательства.
Однако следующему поколению автономных транспортных средств не потребуются рулевые колеса, педали или трансмиссии.Преимущество таких автомобилей заключается в возможности уменьшения количества аварий и предоставления необходимого транспорта для людей, не способных управлять автомобилем, таких как пожилые люди или люди с ограниченными возможностями зрения или физическими недостатками.
Но есть и потенциальный недостаток: потребность в человеческом агентстве, которое настраивает программирование автомобиля, чтобы предвидеть все возможные сценарии и направлять машину, чтобы выносить те суждения, которые люди должны делать, когда сценарий требует действий, которые неизбежно причинить вред в той или иной форме.
Хотя Tesla может быть самым известным именем на фронте ИИ для транспортных средств, она, безусловно, не единственный игрок на этом растущем рынке. Некоторые гораздо более почтенные имена в индустрии также участвовали в этом процессе.
Некоторые гораздо более почтенные имена в индустрии также участвовали в этом процессе.
СВЯЗАННЫЕ С: ИНТЕРЕСНАЯ ИСТОРИЯ ЭЛЕКТРОМОБИЛЕЙ
Бернард Марр недавно написал о миллиардных инвестициях Toyota в беспилотные автомобили и искусственный интеллект. Компания поставила перед собой цели, которых она хочет достичь к 2020 году:
«Благодаря инвестициям Toyota в технологические стартапы, такие как Perceptive Automata, она надеется создать технологию, которая позволит автономным транспортным средствам более интуитивно похожи на человеческую интуицию, когда они находятся в движении. Дорога больше похожа на то, как водители-люди взаимодействуют с пешеходами.”
История безопасности беспилотного вождения
Конечно, мы еще не достигли этого. Но вопрос в том, является ли это конечной целью и должны ли мы ее преследовать без полного рассмотрения последствий полностью независимого автомобиля.
В каждом случае ДТП и смерти самоуправляемого автомобиля перечислено девять ДТП с участием автономных транспортных средств, только четыре из которых привели к гибели людей.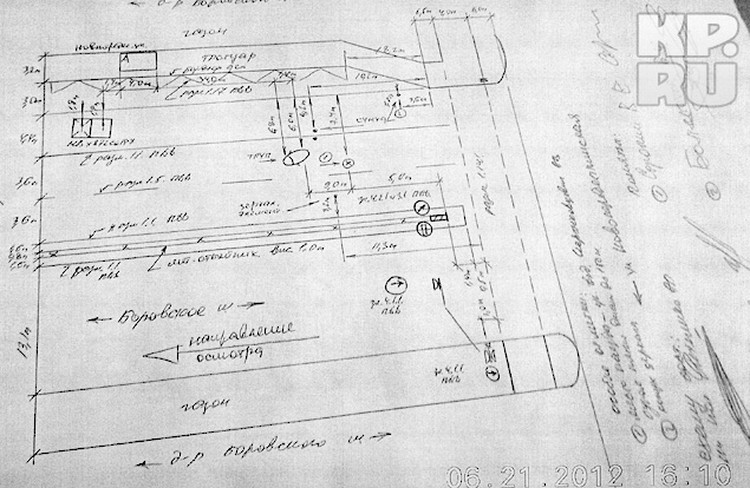 Однако, несмотря на претензии к названию, список неполный, поскольку после публикации статьи в таких авариях были жертвы.
Однако, несмотря на претензии к названию, список неполный, поскольку после публикации статьи в таких авариях были жертвы.
Последний случай со смертельным исходом, о котором сообщалось, был связан с автомобилем Tesla Model X 23 марта 2018 года. Водитель автомобиля погиб, когда он врезался в шлагбаум. Тесла обвинил это в том, что барьер мешал автономной системе вождения автомобиля:
«Причина, по которой эта авария была настолько серьезной, заключается в том, что амортизатор столкновения, барьер безопасности на шоссе, который предназначен для уменьшения удара о бетонный разделитель полосы движения, имел был раздавлен в предыдущей аварии без замены », — говорится в заявлении Tesla.
Компания добавила: «Мы никогда не видели такого уровня повреждений Model X при любой другой аварии».
К сожалению, на этом аварии беспилотных автомобилей Tesla со смертельным исходом не закончились. Ряд из них произошел в этом году.
Среди инцидентов был один 1 марта 2019 года.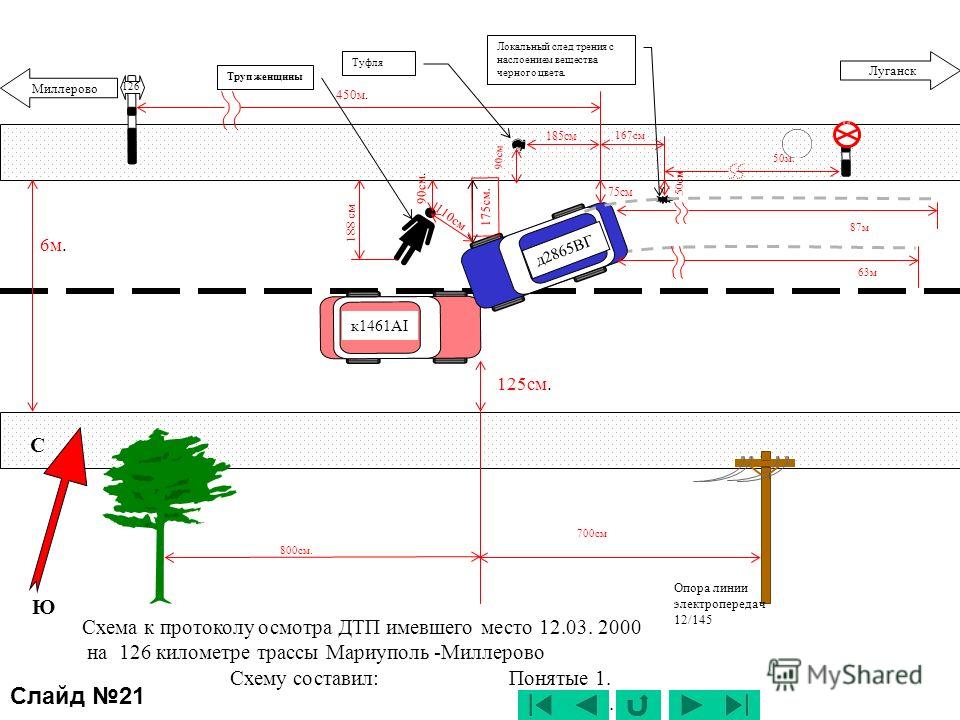 Национальный совет по безопасности транспорта США (NTSB) подтвердил, что полуавтономное программное обеспечение автопилота использовалось на Tesla Model 3, когда он врезался в тягач с прицепом, пытающимся пересек шоссе Флориды, водитель автомобиля погиб.
Национальный совет по безопасности транспорта США (NTSB) подтвердил, что полуавтономное программное обеспечение автопилота использовалось на Tesla Model 3, когда он врезался в тягач с прицепом, пытающимся пересек шоссе Флориды, водитель автомобиля погиб.
Хотя они все еще относительно редки, по сравнению с дорожно-транспортными происшествиями, вызванными водителями-людьми, тот факт, что в результате беспилотных автомобилей случаются несчастные случаи и несчастные случаи со смертельным исходом, заставляет людей опасаться их безопасности и программирования. Фактически, в этом году Quartz поставил под сомнение заявления Tesla о безопасности.
Как и в случае аварии Tesla, в большинстве аварий с автономными автомобилями погибает человек, сидящий на водительском сиденье. Тем не менее, были случаи, когда люди, находившиеся вне автомобиля, сбивались и убивались автономными автомобилями.
Самым печально известным инцидентом такого рода может быть инцидент с участием Uber в результате гибели Элейн Херцберг в марте 2018 года. 49-летняя женщина шла и толкала свой велосипед по Милл-авеню в Темпе, штат Аризона, когда ее сбила машина Uber.
49-летняя женщина шла и толкала свой велосипед по Милл-авеню в Темпе, штат Аризона, когда ее сбила машина Uber.
Видео инцидента, опубликованное полицией, можно посмотреть здесь:
В результате этого компания Uber приняла политику, предусматривающую включение в свои автомобили водителей-людей. История сообщается здесь: Uber возвращает к работе беспилотные автомобили, но с водителями-людьми.
Это способ для Uber обойти проблему, с которой нам придется столкнуться, если и когда полностью автономные автомобили станут нормой: как запрограммировать их, чтобы они включали в себя инстинкт сохранения человеческой жизни.
Программирование ИИ с заботой об этике
Как мы видели в другой статье «Наш дивный новый мир: почему развитие ИИ вызывает этические проблемы», с огромной силой ИИ приходит большая ответственность — убедиться, что технологии не создают ситуации хуже во имя прогресса.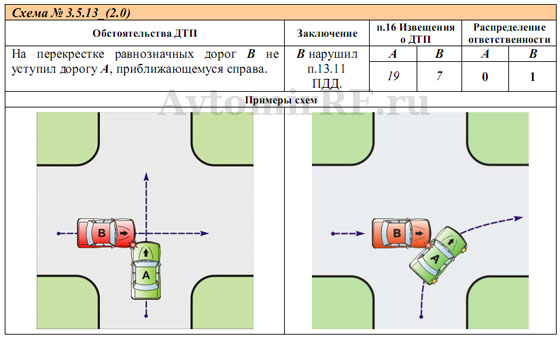 Изучение этики ИИ привлекло внимание людей, которые думают о том, что нужно сделать перед внедрением автоматизированных решений.
Изучение этики ИИ привлекло внимание людей, которые думают о том, что нужно сделать перед внедрением автоматизированных решений.
Один из этих людей, Пол Тагард, доктор философии, канадский философ и ученый-когнитивист, поднял некоторые из проблем, с которыми мы должны сейчас столкнуться в отношении этики программирования в ИИ, в книге «Как создать этический искусственный интеллект».
Он поднимает следующие 3 препятствия:
- Этические теории очень противоречивы.Некоторые люди предпочитают этические принципы, установленные религиозными текстами, такими как Библия или Коран. Философы спорят о том, должна ли этика основываться на правах и обязанностях, на высшем благе для наибольшего числа людей или на добродетельных поступках.
- Этичное поведение требует удовлетворения моральных ценностей, но нет единого мнения о том, какие ценности подходят или даже какие ценности. Без учета соответствующих ценностей, которые люди используют, когда действуют этично, невозможно согласовать ценности систем ИИ с ценностями людей.
- Чтобы построить систему ИИ, которая ведет себя этично, представления о ценностях, правильном и неправильном должны быть достаточно точными, чтобы их можно было реализовать в алгоритмах, но точность и алгоритмы крайне не хватает в текущих этических обсуждениях.
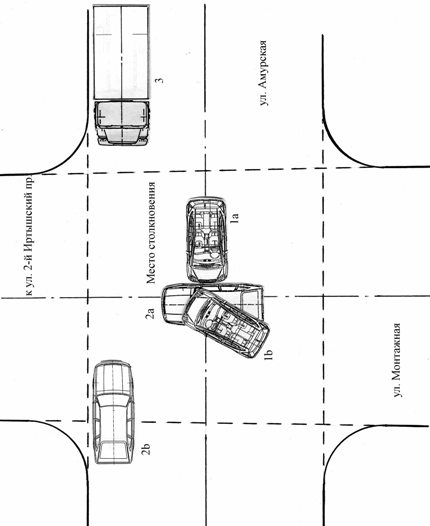
Тагард действительно предлагает подход к преодолению этих проблем, говорит он и ссылается на свою книгу Натуральная философия: от социального мозга к знаниям, реальности, нравственности и красоте . Однако в ходе статьи он не предлагает решения, специально предназначенного для программирования беспилотных автомобилей.
Беспилотные автомобили и проблема тележки
В идеале водители избегают столкновения ни с чем, ни с кем-либо. Но можно попасть в ситуацию, в которой невозможно избежать столкновения, и единственный выбор — в кого или людей ударить.
Эта этическая дилемма известна как проблема тележки, которая, как и сама тележка, возникла более века назад. Обычно его представляют следующим образом:
Вы видите, как сбежавший троллейбус движется к пяти связанным (или иным недееспособным) людям, лежащим на рельсах. Вы стоите рядом с рычагом, который управляет переключателем. Если вы потянете за рычаг, тележка будет перенаправлена на боковой путь, и пять человек на главном пути будут спасены. Однако на обочине дороги лежит одинокий человек.
Вы стоите рядом с рычагом, который управляет переключателем. Если вы потянете за рычаг, тележка будет перенаправлена на боковой путь, и пять человек на главном пути будут спасены. Однако на обочине дороги лежит одинокий человек.
У вас есть два варианта:
- Ничего не делать и позволить тележке убить пять человек на главном пути;
- Потяните за рычаг, отклонив тележку на боковую колею, где она убьет одного человека.
Конечно, действительно хорошего выбора здесь нет.Вопрос в том, какой из двух плохих вариантов меньше. Именно такую дилемму Зеленый Гоблин представил Человеку-пауку в фильме 2002 года, пытаясь заставить его выбирать между спасением канатной дороги, полной детей, или женщины, которую он любит:
Быть супергероем, Человек-паук смог использовать свои способности прядения паутины и силу, чтобы спасти обоих. Но иногда даже супергероям приходится делать трагический выбор, как это было в фильме 2008 года Темный рыцарь , в котором Бэтмен решил оставить любимую женщину во взорвавшемся здании.
Но иногда даже супергероям приходится делать трагический выбор, как это было в фильме 2008 года Темный рыцарь , в котором Бэтмен решил оставить любимую женщину во взорвавшемся здании.
Таким образом, даже те, кто обладает превосходными способностями, не всегда могут спасти всех, и такая же ситуация может применяться к автомобилям с поддержкой ИИ.
Тогда возникает вопрос: какой этический кодекс мы применяем, чтобы запрограммировать их на такой выбор?
Что должен делать беспилотный автомобиль?
MIT Technology Review привлек внимание некоторых исследователей, которые несколько лет назад работали над формулировкой ответов в книге «Как помочь самоуправляемым автомобилям принимать этические решения». Среди исследователей в этой области — Крис Гердес, профессор Стэнфордского университета, который изучал «этические дилеммы, которые могут возникнуть, когда самоуправляемое транспортное средство внедряется в реальном мире».»
Он предложил более простой выбор: иметь дело с ребенком, выбегающим на улицу, который заставляет машину что-то удариться, но позволяет ему выбирать между ребенком и фургоном на дороге.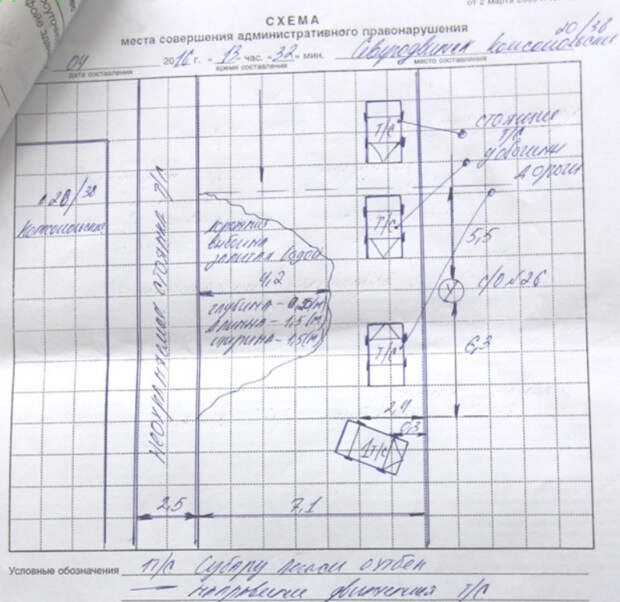 Для человека это не должно быть — мозговой ум, что защита ребенка важнее, чем защита фургона или самого автономного автомобиля.
Для человека это не должно быть — мозговой ум, что защита ребенка важнее, чем защита фургона или самого автономного автомобиля.
Но что подумает ИИ? А что насчет пассажиров в автомобиле, которые могут получить травмы в результате такого столкновения?
Гердес заметил: «Это очень трудные решения, с которыми каждый день сталкиваются разработчики алгоритмов управления для автоматизированных транспортных средств.
В статье также цитируется Адриано Алессандрини, исследователь, занимающийся автоматизированными транспортными средствами в Университете де Рома Ла Сапиенца в Италии, который возглавлял итальянскую часть европейского проекта CityMobil2 по тестированию автоматизированных транспортных средств. Смотрите видео об этом ниже:
Она инкапсулирует проблему тележки для водителей и беспилотных автомобилей в следующем суммировании:
«Вы можете увидеть что-то на своем пути, и вы решите сменить полосу движения, и как и вы, в этом переулке есть что-то еще.
 Так что это этическая дилемма ».
Так что это этическая дилемма ».Еще один видный специалист в этой области — Патрик Лин, профессор философии из Калифорнийского политехнического университета, с которым работал Гердес. TED-Ed Линя рассматривает этические проблемы программирования беспилотных автомобилей для принятия решений о жизни или смерти, представленный в виде мысленного эксперимента в этом видео:
Если бы мы управляли автомобилем с коробкой в ручном режиме, Какой бы способ мы ни отреагировали, это будет восприниматься как реакция, а не намеренное решение », — говорит Линь в видео.Соответственно, это будет пониматься как «инстинктивный панический шаг без предусмотрительности или злого умысла».
Совершенно реальная возможность гибели людей не в результате неисправности, а в результате следования программам машин — вот что делает так важным заранее продумать, как поступить с тем, что Лин описывает как «своего рода алгоритм нацеливания». »
Он объясняет, что такие программы будут «систематически отдавать предпочтение или дискриминировать определенный тип объекта, в который можно врезаться.